Mechanical Design
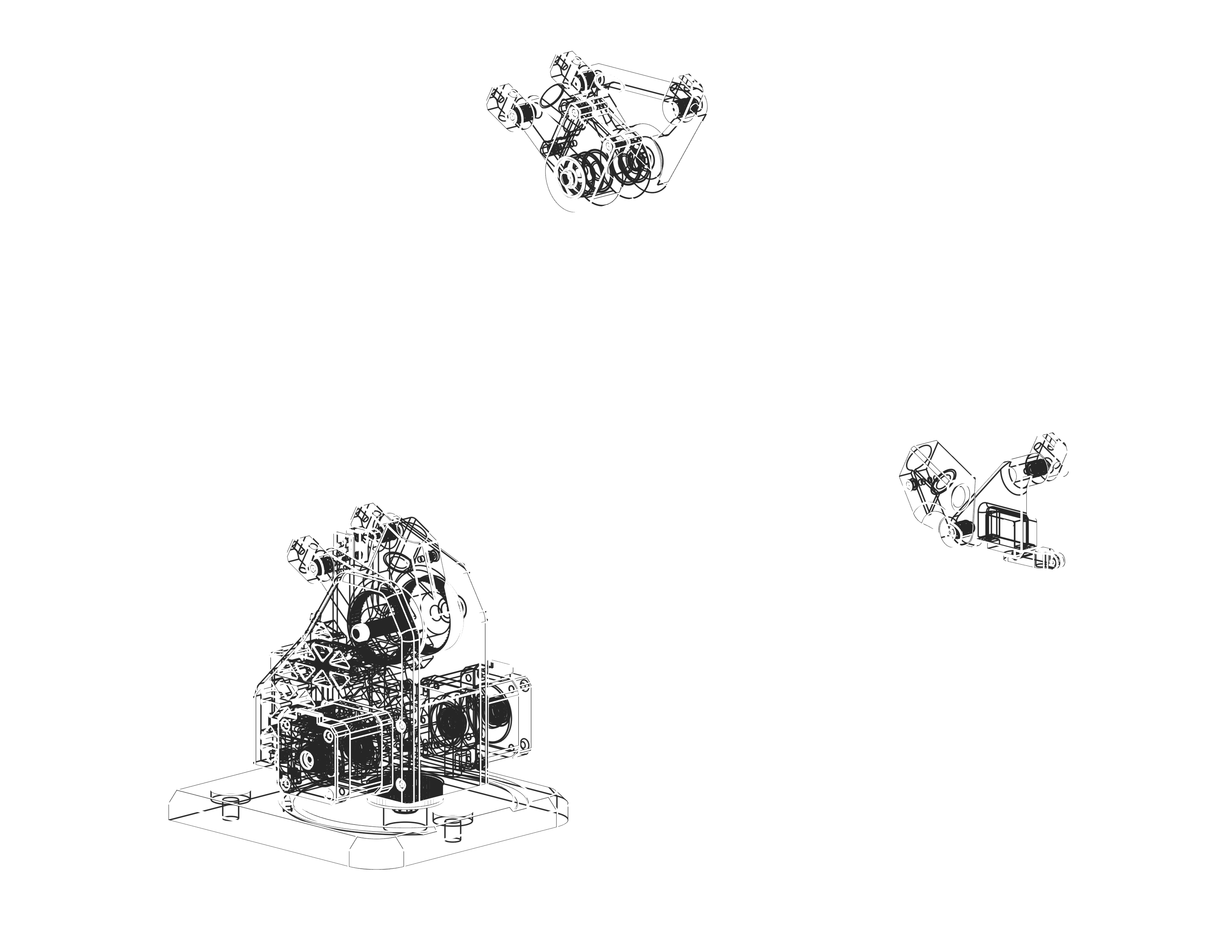
The main mechanical component is the arm itself. Designed similarly to industrial palletizing robots, it features a total of 3 four bar linkages which serve to keep the steppers at the base of the robot, and also keep the end effector level. This makes the arm light and perfect for stacking jenga blocks.
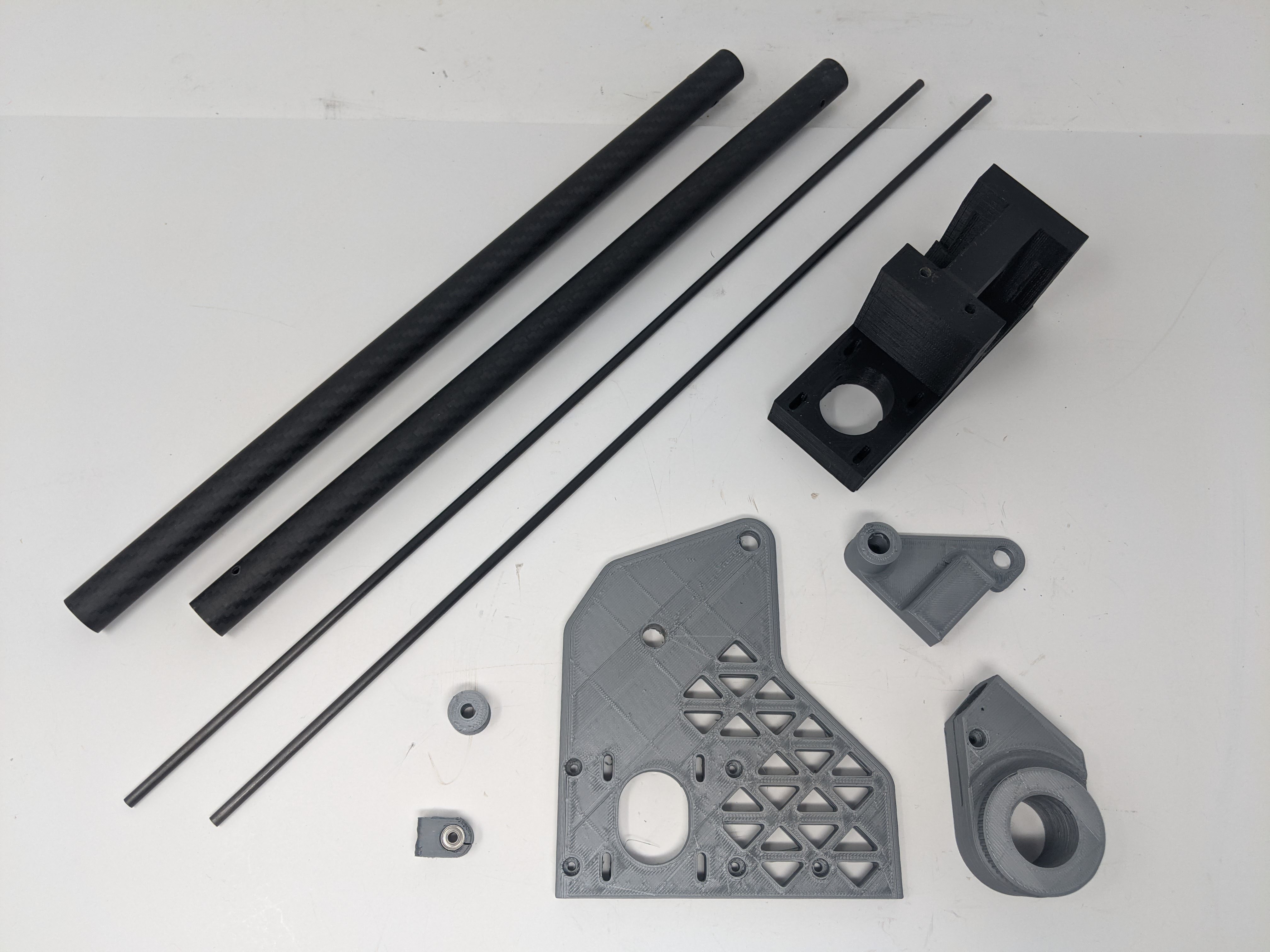
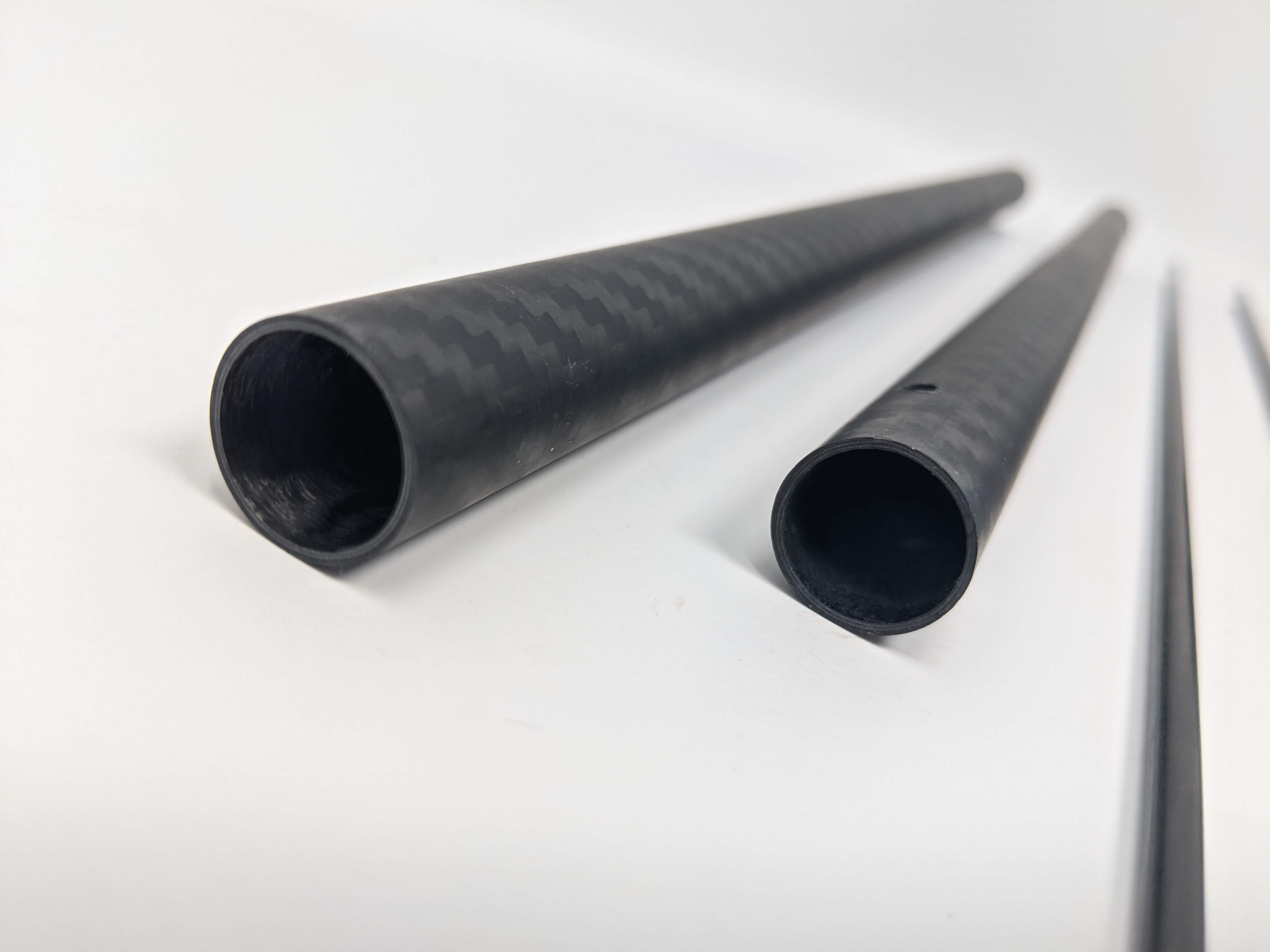
For modularity, the arm is made up of many small 3d printed components. This allowed us to prototype quickly and change only the components we needed to. The long linkage sections of the arm are made from carbon fiber tubes, which provide the rigidity necessary for precision movement without making the end of the arm too heavy to drive. To further lightweight the arm, the top pivot is a 3D printed bolt, much lighter than the steel alternative.
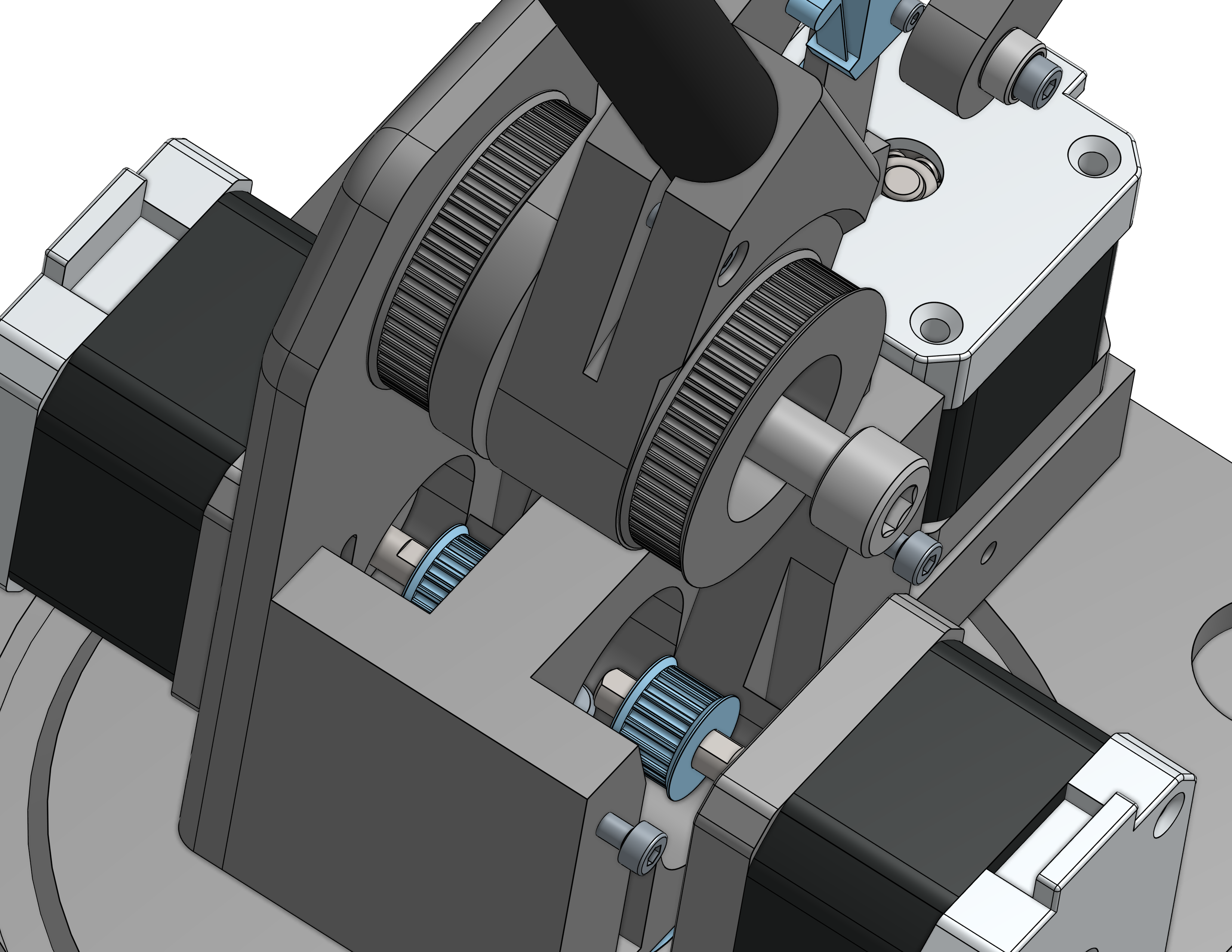

The base of the arm features 3 NEMA 17 stepper motors. Since these motors provide more speed than we needed, we belted them in a 3:1 ratio to increase torque. These 3 belt systems also make the design compact and keep the heavy steppers as low as possible to increase stability.
To accurately detect the positions of blocks, a camera must be positioned exactly above the center of the base board. The main segments of the camera mount are ¾” schedule 40 PVC pipe, and 3D printed parts connect the camera to the pipe and the pipe to the base board. The entire mount is painted black, and the camera cable runs within the tube for a clean appearance.

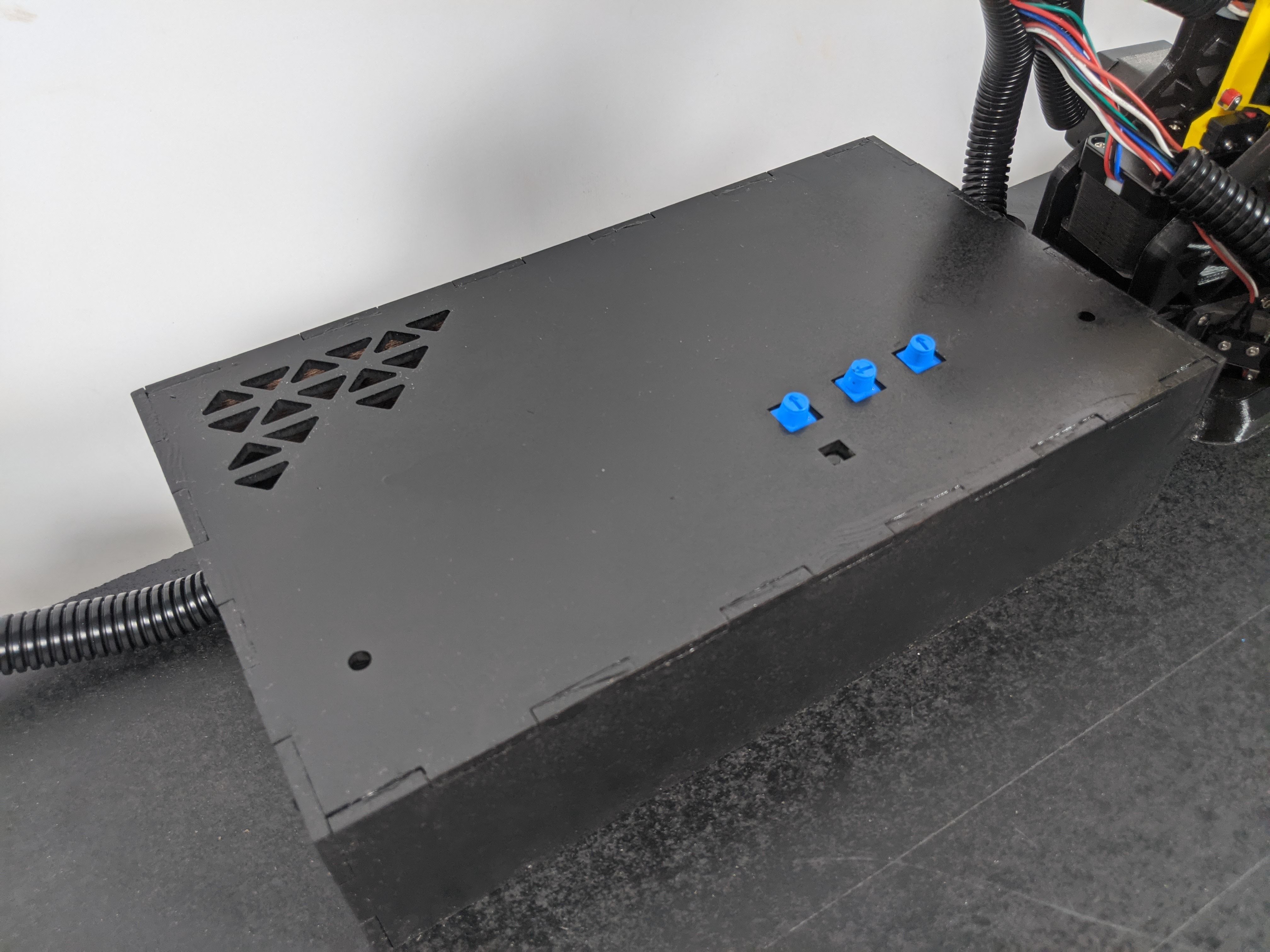

Made from 4mm hardboard painted black and adorned with Armadillo’s stylistic triangles, the electronics box houses Armadillo’s “brain”. Wires from the arm and power supply run to circuit boards in the electronics box, and integrated fans keep the stepper motor drivers cool. Inside the electronics box, circuit boards and pump components are neatly mounted in an optimized position to keep the box as small as possible.