Gallery
How we made BB-8
This BB-8 robot design integrates mechanical, electrical, firmware, and software components to create a fully navigatable spherical robot. This robot can be controlled via a virtual joystick, and commands are sent from the joystick to the robot in real time for navigating in 2D.

On our laptop we convert commands from the joystick into speeds that our three motors should be going. We then send those speeds to the Arduino over bluetooth using the HC-05 blueetooth module to recieve the signal. Then the arduino normalizes the motor speeds and relays the commands to the motor shield to guide the robot in the right direction.

Sprint 1
Our goal for this sprint was to design and build a two-wheel robot that drives in a sphere based on a pre-programmed...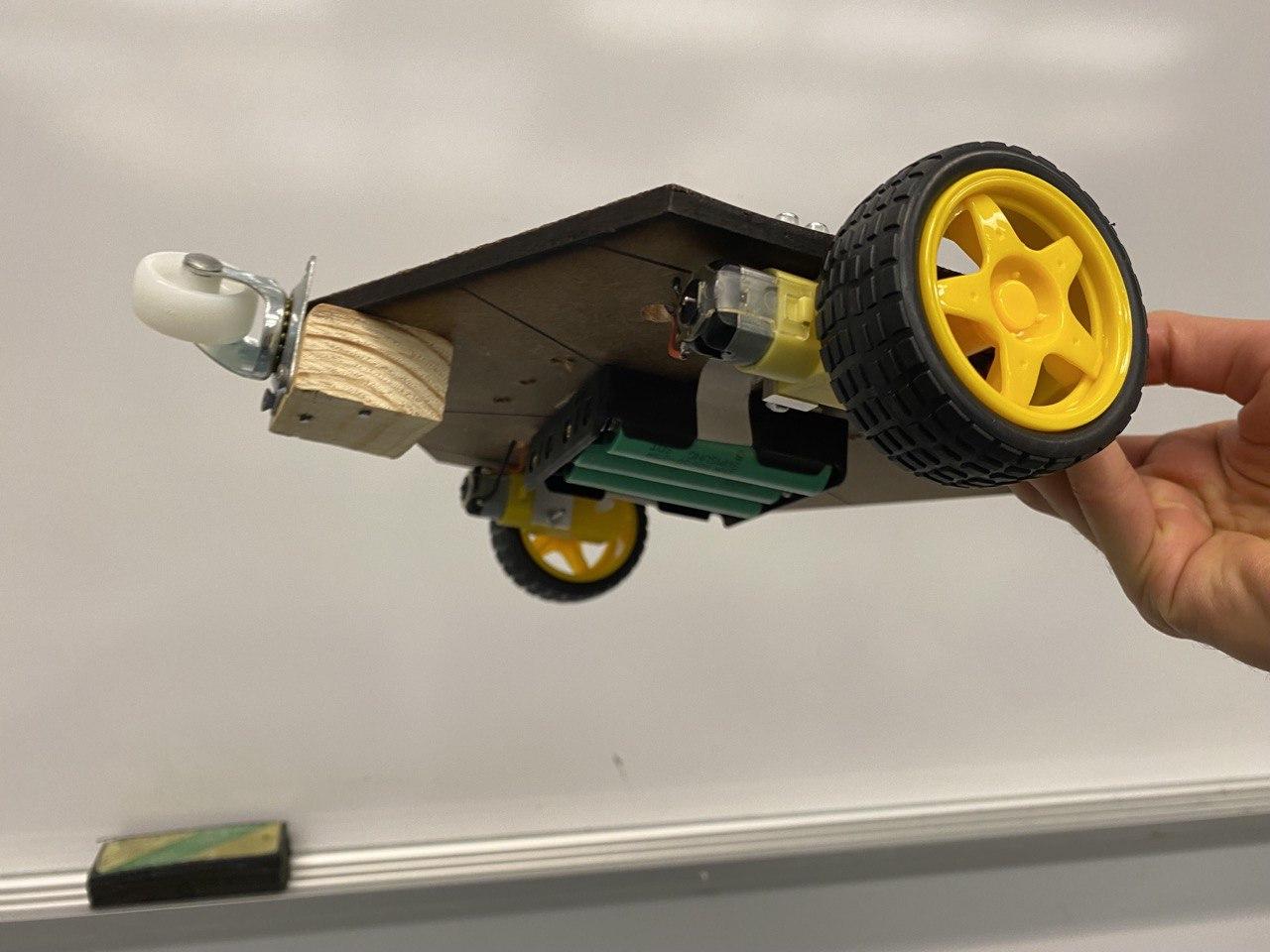
Sprint 2
In this sprint, we wanted to make our robot wireless. This included incorporating our Bluetooth module and adding...