Our goal for this sprint was to design and build a two-wheel robot that drives in a sphere based on a pre-programmed path.
Subteam Progress
Software
In this sprint, we were able to preload a set of drive commands to the robot to enable it to drive in the hamster ball. The robot is controlled via Arduino Uno. Future steps include wireless control of the robot using Bluetooth and some controller such as a joystick or laptop arrow keys.
Mechanical
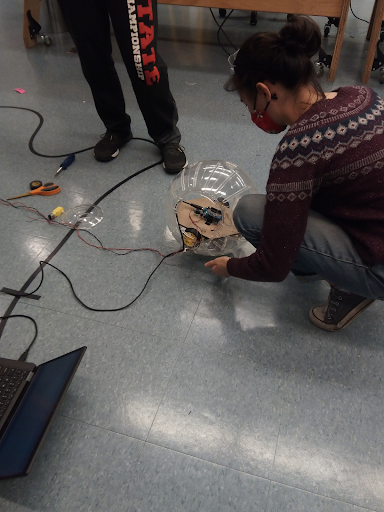
In this sprint we used motors from the PIE mini project 3 kits to build our 2 wheel drive. We designed a 10" wide hexagonal chassis to mount our wheels and circuitry to. We had one stabilizer in the back to keep our robot balanced. We also modified our hamster ball to be able to close it and reopen it. Some challenges we faced this sprint were that our robot did not have a low center of gravity in the ball. This would result in it driving inside of the ball instead of getting the ball to roll.
Electrical
We used an outlet for power with a motor shield and Arduino to create the first prototype. We did not yet have batteries to power the Arduino until Sprint 2.