Hoverbot Software Development
This page describes the history of our hovercraft software (called hovercraftpy) through our three design sprints. To view the code, please checkout our repository on GitHub.
Architecture Overview
The brain of the hovercraft is powered by a Raspberry Pi 3. All of the software
is written in Python. The components running on the Raspberry Pi are broken up
into controllers and drivers.
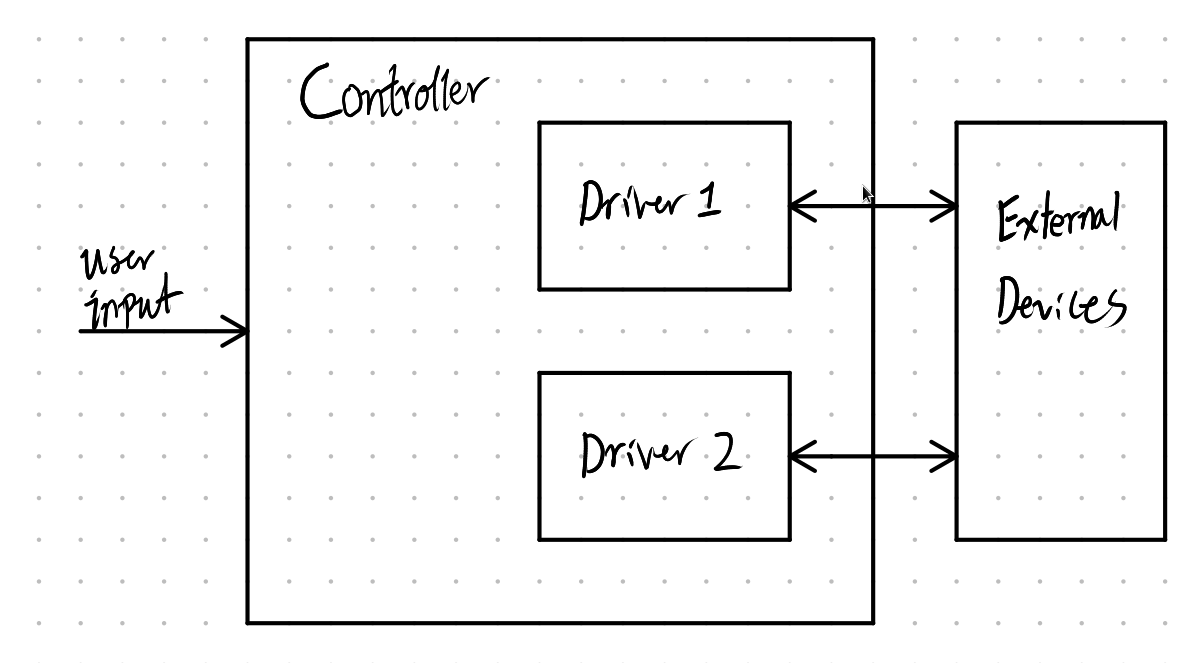
Controller modules exist to run the hovercraft’s control loop:
- Read user input. Different versions of the controller module exist to read different forms of input (web requests, bluetooth, USB radio).
- Act on user input to update state
- Send state to motor driver
Driver modules exists to interface with external devices using protocols such
as USB, SPI, and I²C. These devices include the Pi Pico, the IMU, and the GPS.
Drivers were based on an abstract base class called HovercraftDriver.
Additional features and versions of drivers and controllers were added across sprints.
Sprint 1
You can checkout the end-of-sprint1 branch to view the software from this
sprint.
-
Implemented a web-server based controller using Tornado. The Raspberry Pi hosted a simple website that allowed a user to send commands to the hovercraft.
-
Implemented a pySerial based driver to talk to the Pi Pico firmware. We used this driver to control the thrust fan and the rudder.
Screenshot of web controller website. The website listens to keyboard presses and sends requests back to the Raspberry Pi.
Sprint 2
You can checkout the sprint2 branch to view the software from this sprint.
-
Refactored the codebase to use a proper Python project manager. Running Python files directly with
pythonlimits the project to a single directory as and makes it hard to manage dependencies. We ended up settling on Poetry for its ease of use. -
Extended the web controller allow control of the newly added hover motor.
-
Wrote a driver to talk to an IMU. This gave us access to accelerometer, gyroscope, and magnetometer data.
-
Wrote a PID motor driver. This driver makes use of the original motor driver (now extended to control hover motor) and the IMU driver. The PID loop takes control of the hovercraft is told to not steer, and continuously adjusts the rudder angle to bring angular velocity to zero.
Sprint 3
This is the state of the main branch.
-
Implemented a Bluetooth controller module. This module reads input from a Bluetooth gamepad (specifically a Wii U Pro Controller), giving us access to analog rudder control. This runs on the Raspberry Pi.
-
Extended web controller with a new request to receive analog controller data.
-
Wrote pygame based applet to send web requests from a different computer. This circumvents the need for the clunky website and allows for analog control. In addition, this applet is extendable to use another form of control, such as a USB radio module. This runs on a separate laptop PC.
-
We started having issues with pySerial, resulting in an unacceptable input delay of over a second. Unable to find the cause or a solution, we implemented a non-ideal workaround using a system call to write to the serial port. Unfortunately, using this method sometimes results in glitchy behavior if the motor state is updated too frequently, making the PID driver unusable.
Discord Bot
We needed to obtain the Raspberry Pi’s local IP address to access the Raspberry Pi over ssh and to control over http. Considering how our team already communicated over Discord, we opted to write a Discord bot that would print the Pi’s IP to the chat. We also wrote a systemd unit file to start the Discord bot on the Pi’s boot. This bot served its purpose for the entirety of the project.
Firmware
The motors were driven by a Raspberry Pi Pico microcontroller (see electrical for details).
The firmware reads the Pi Pico’s serial buffer, parsing for commands in a gcode-like format. Commands tell the Pico to update the speed of the motors and the angle of the rudder servo. For some reason, the Pico read each command twice, always once with an argument of zero. We solved this issue with a unique bug fix: read a command twice before an action, and pick the higher value of the two. This ensured that each operation was not immediately undone.
The firmware was the least changed part of the project across the design sprints.
- Sprint 1: Controlled thrust motor and rudder servo.
- Sprint 2: Added control for hover motor.
- Sprint 3: Unchanged