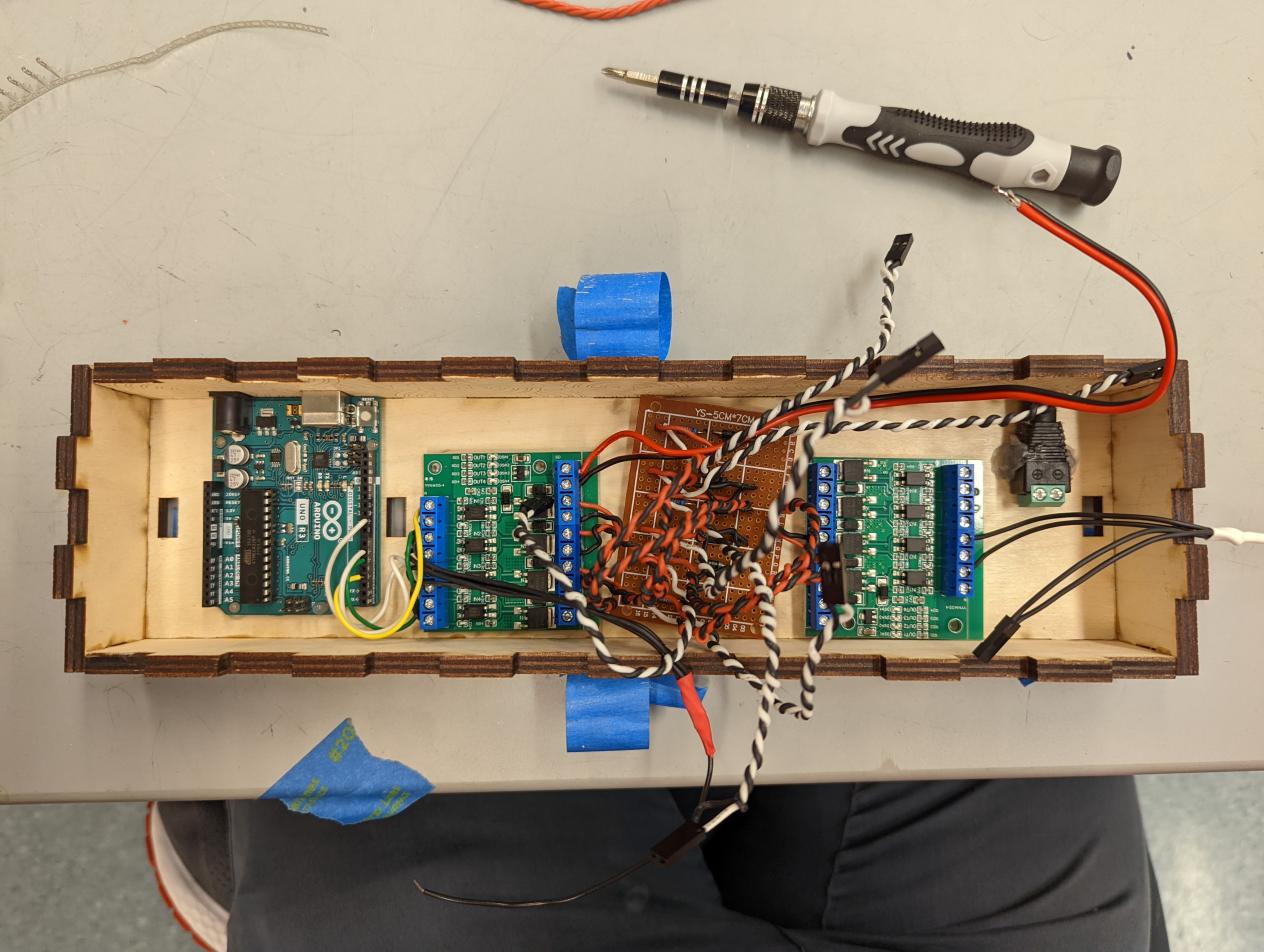
There are three significant mechanical aspects to this project: the attachments on the tube to hold electromagnets and sensors, the acrylic tube, and the wooden box that houses the electronics and supports the tube.
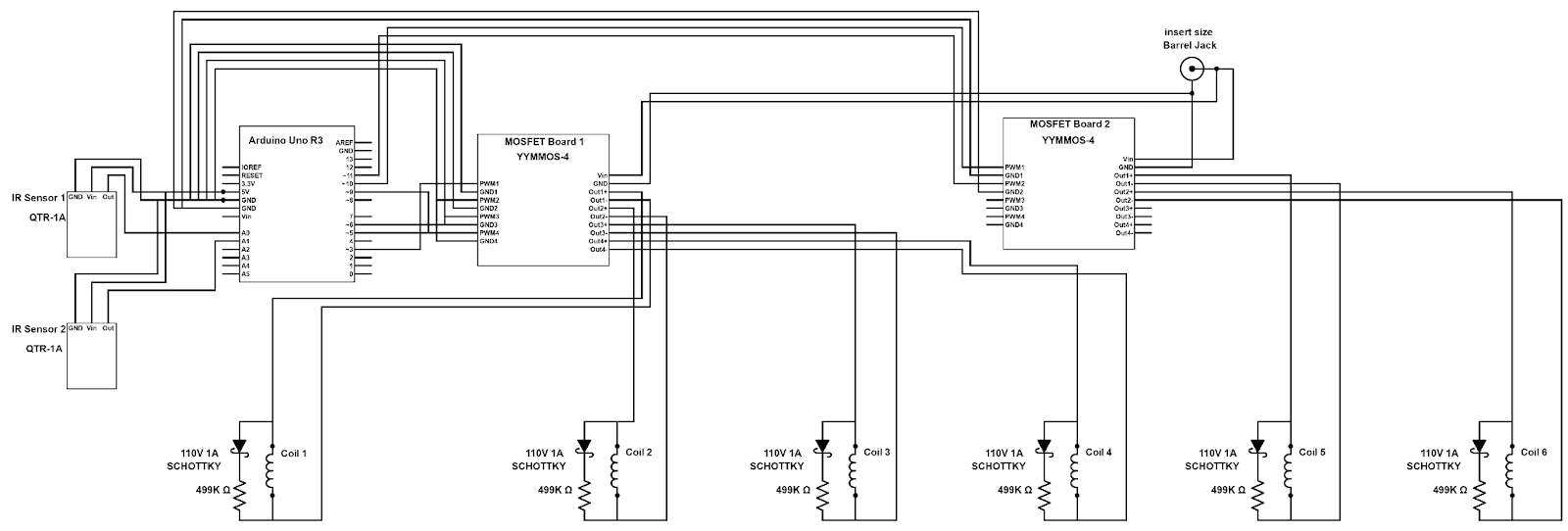
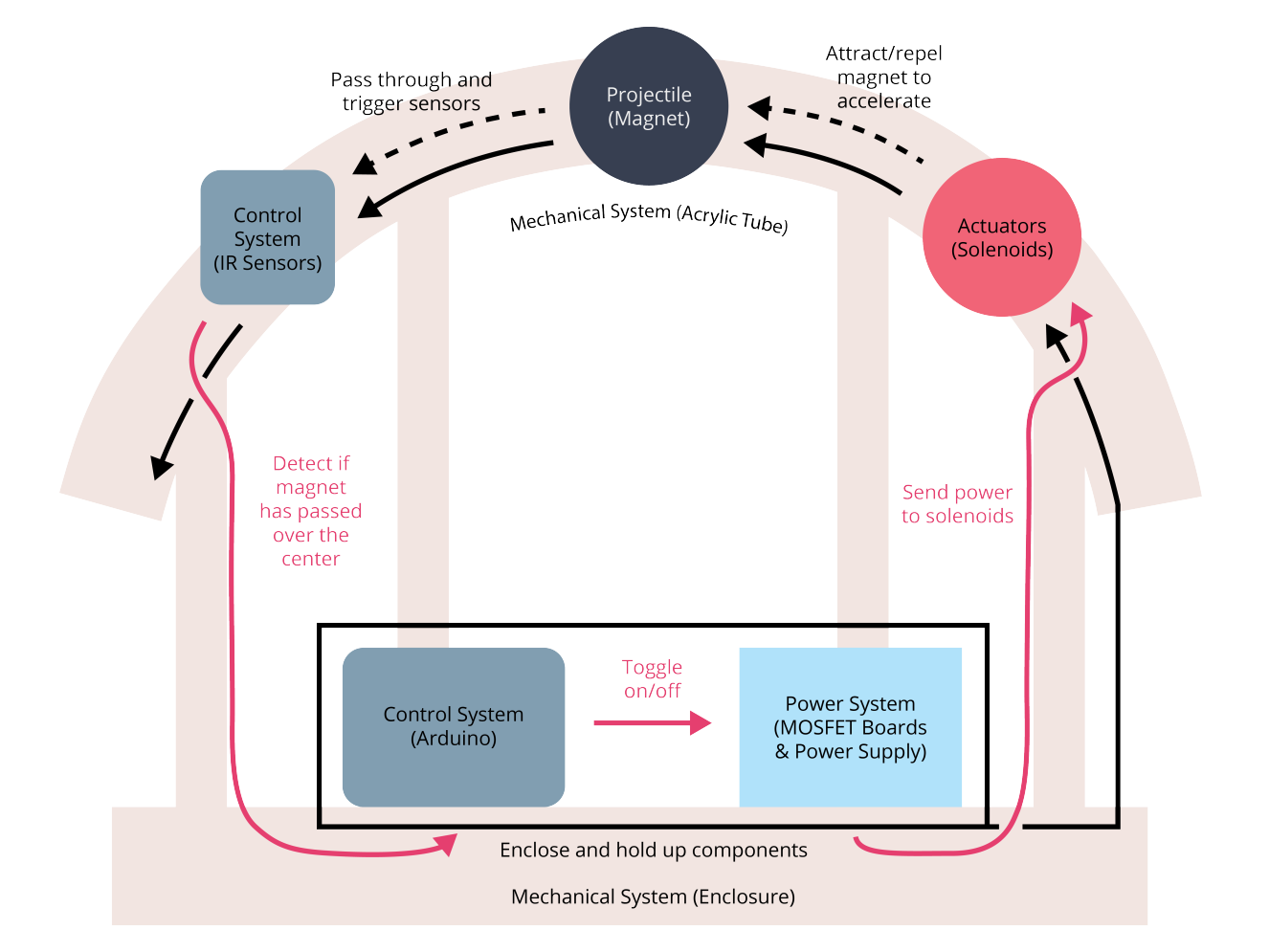
SMAKS is controlled by an Arduino UNO, which toggles 6 MOSFETs across 2 YYMMOS-4 4-channel MOSFET boards. The MOSFET boards are connected to a benchtop power supply which supplies them with 24V DC power, and each MOSFET on the board triggers power being sent to a homemade solenoid. The solenoids on each end of the arced tube are wired to repel the magnet used as the projectile, while the four center solenoids attract. The solenoids and MOSFETs are wired together through perfboard that sends power from a MOSFET to solenoid in parallel with a 449KΩ resistor and a 100V 1A diode, which are used to prevent backflow from any charge generated in the solenoid by the magnet passing through. 2 QTR-1A IR reflectance sensors, one placed on each side of the acrylic tube, are wired directly to the Arduino and provide an analog input used to determine whether the magnet is above the sensor.
We determined the solenoid specifications through trial and error, changing coil length, turn count, and current, in line with the equation magnetic field = relative permeability * turn density * current, where the relative permeability of air (no core) is 1, turn density is proportional to turn count and inversely proportional to coil length, and current is controlled by wire gauge and input voltage. The final solenoids have 2000 turns of 32AWG magnet wire and are 0.8” long.
We already had access to many of the items we used for this project, but the complete table of money spent can be found through the link below.
bill of materialscreated with
Website Builder Software .