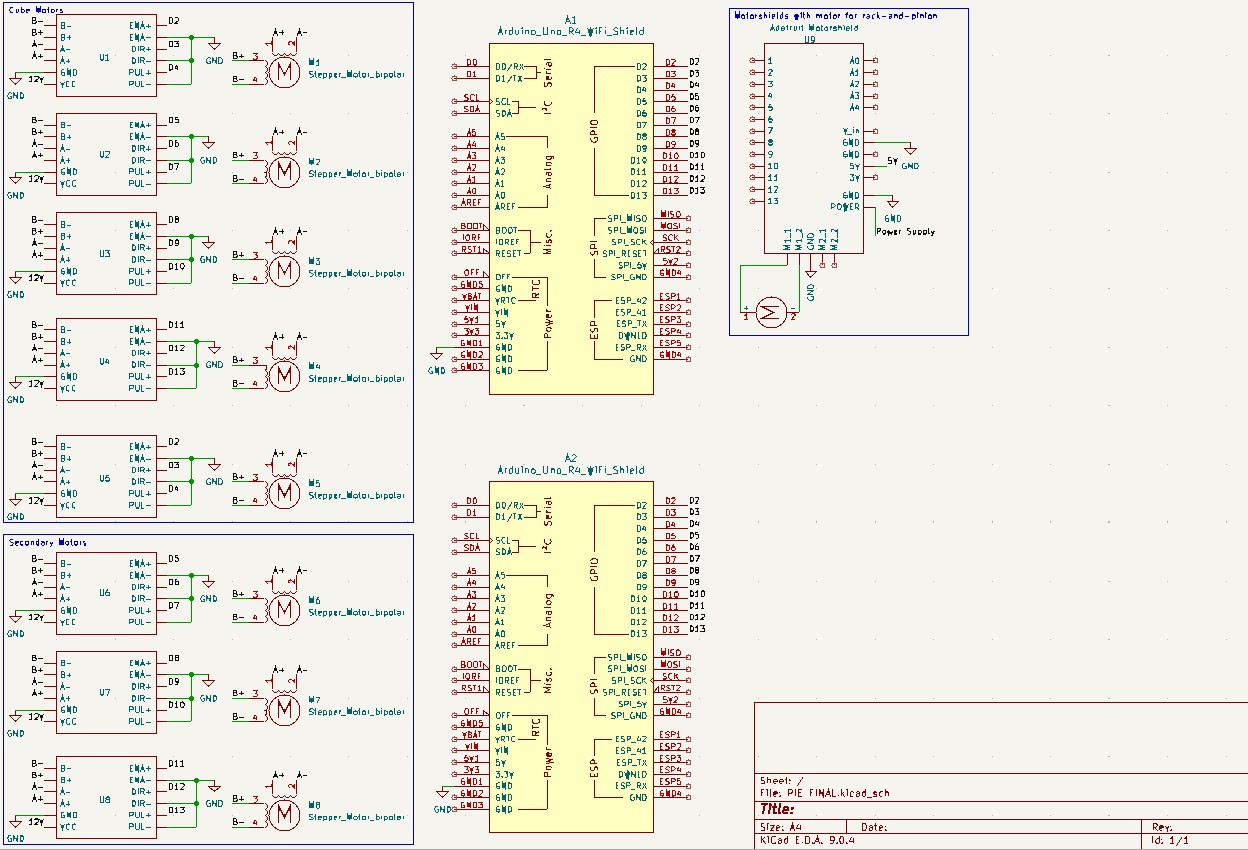

Arduino Uno R4 Wifi
We use three Arduino Uno R4s to control the motors. The Arduinos receive commands from the Raspi through Serial input via USB cable. The commands from the Raspi are in the form of a 3-digit integer. The first digit corresponds to the Arduino board ID, the second identifies the motor, and the third digit informs of the direction to rotate.