Process
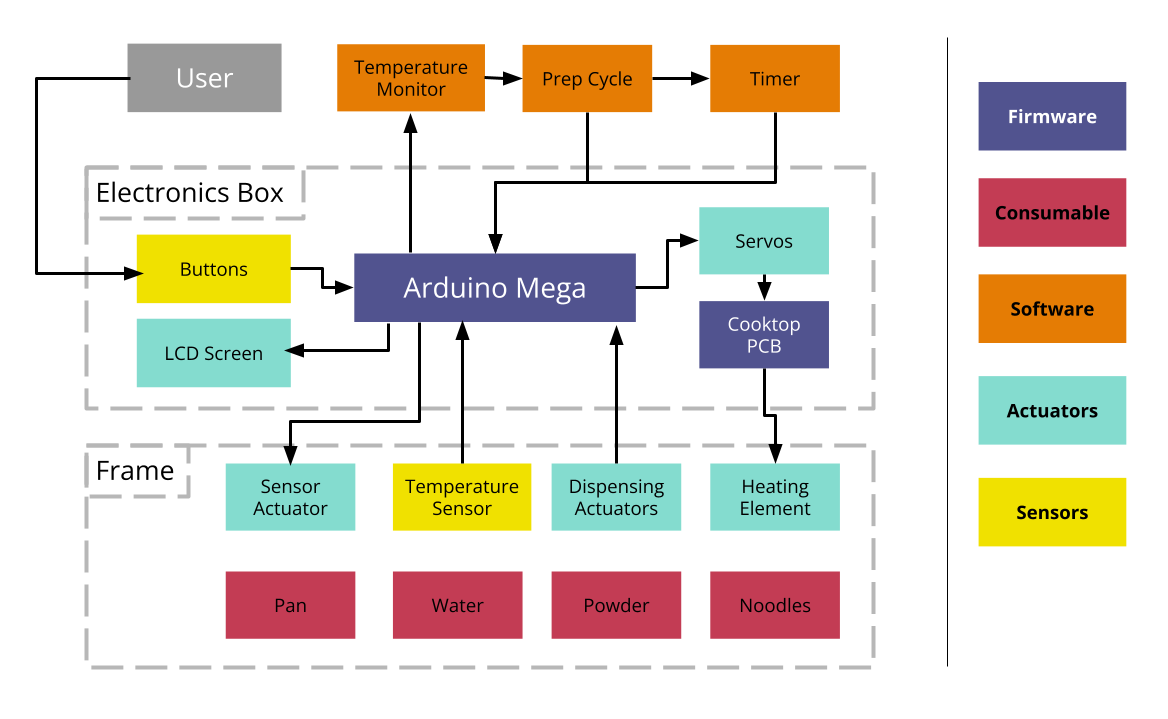
Our electrical system involves two power sources, a single Arduino Mega, a secondary Arduino Uno for extra power, one STSPIN820 stepper motor driver, one stepper motor, six servo motors, two vibration motors, one LCD display, a temperature sensing probe, the COTS Hotplate PCB, and multiple buttons.
Systems Overlook
Sprint 1
Goals: Is this Possible?
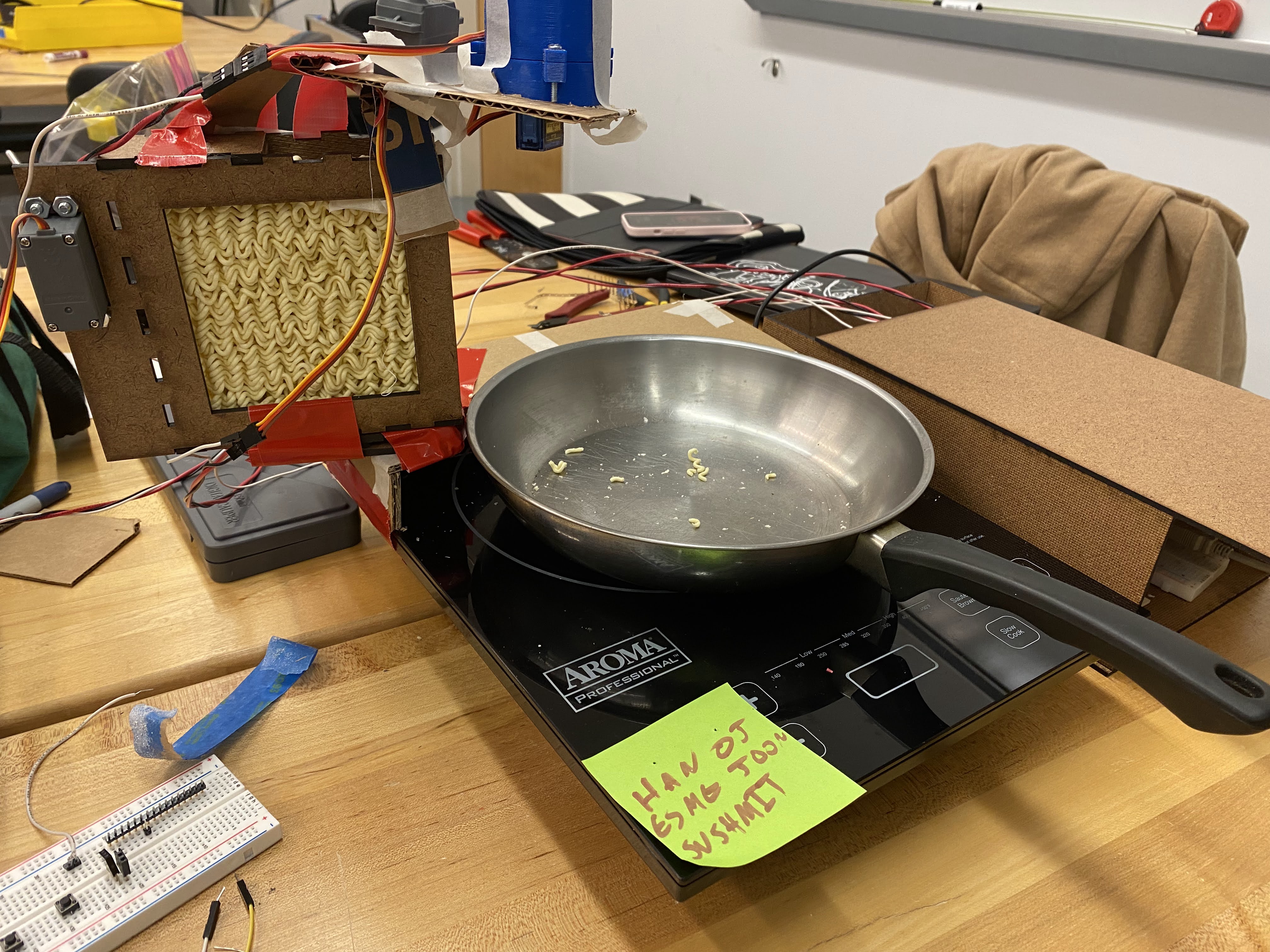
Powder and noodle dispensing, and controlling the hotplate
Design: We used sprint 1 as a proof of concept for our MVP components. We chose to focus on boiling the water, and adding noodles and powder to the bowl. As a reach, we also wanted to use a temperature sensor to detect when the water was boiling.
- Mechanical: Create a single noodle dispenser and powder dispenser.
- Electrical: Interact with the hotplate to turn it on and off and connect the temperature sensor.
- Software: Control the servos for all of the components, and read the temperature sensor
Conclusion: We can move the minimum necessary components into our bowl, and boil the bowl of ramen! It is super unstable and definitely not food safe at all.
Sprint 2
Goals: Can We Make Things More Food Safe?
Multiple noodle and powder servings, water dispensing, and a user interface
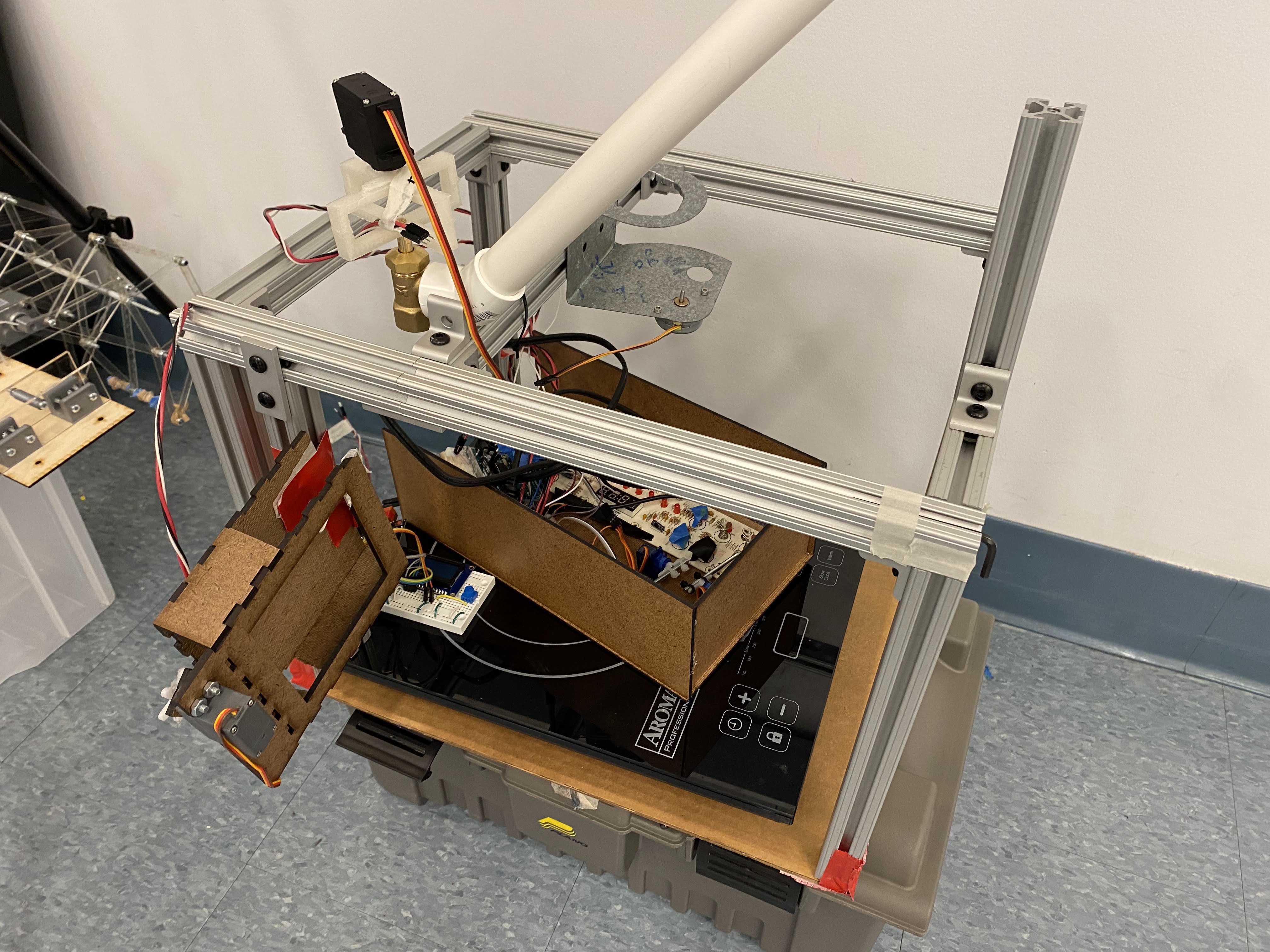
Design: We wanted to create a more stable frame for all of our components to live on, and chose to use 8020 as it was easy to use and move components about.
- Mechanical: Created dispensers to hold multiple noodle and powder servings, Added version 1 of the water dispenser.
- Electrical: Created a user interface with LCD screens and buttons.
- Software: Tested the text to order function, made the code modular for testing.
Conclusion: We need to combine all of these components, and fully test the noodle, powder, and water dispensers.
Sprint 3
Goals: Polish and Integrate
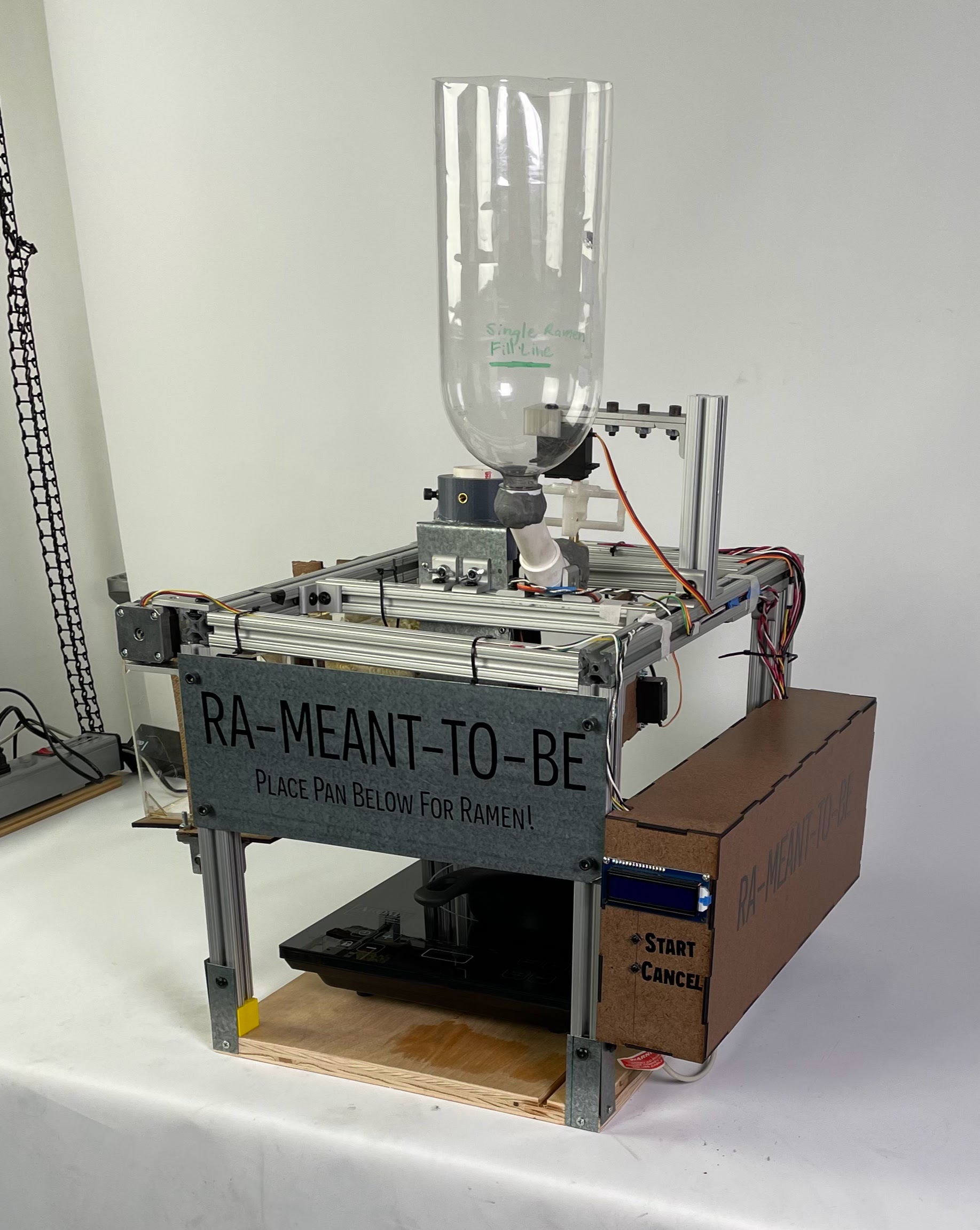
Organized and mounted everything to a final position in the frame, worked on making things more consistent, and made RAMEN!!!!
Design: We wanted to finalize positions and materials, and focus on integration, as our components worked as individuals, but we were unable to test a full runthrough until we switched to an Arduino Mega which arrived at the start of this sprint.
- Mechanical: Multi noodle dispenser, powder dispenser, and water dispenser were fully tested and iterated, so the final versions were implemented
- Electrical: Mounted components in a safe and stable way, cleaned up wiring to be easier to troubleshoot, integrated individual components onto one Arduino Mega. We ran into a few power issues as we have many components on our board, but those were resolved.
- Software: The wireless shield for the text to order function shorted, so we moved to polishing the code to make it easier to test and integrate.
Conclusion: While text to order doesn’t work, we can successfully make ramen, and the bot as a whole is easy to troubleshoot as the components are organized.