The majority of the mechanical design for this project involved making mounts for all the necessary hardware, such as the wheels, ultrasonic sensors, and camera mount.
First Iteration
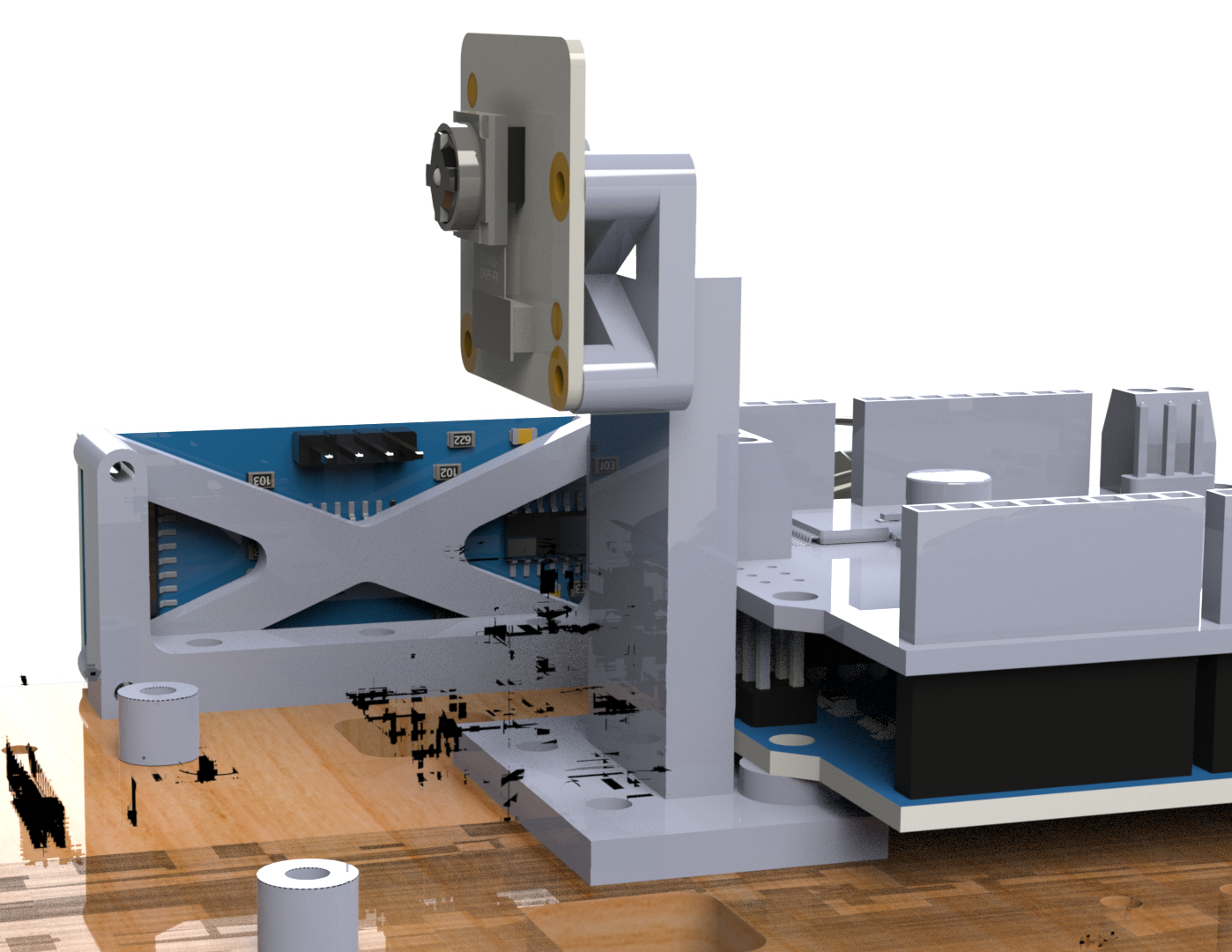
For our first iteration, a simple rectangular chassis was modeled. Mounting holes were added as we integrated various parts. A simple rectangular chassis was modeled. Mounting holes were added as we integrated various parts. We used 4 dc motors (YG2900) in order to achieve 4WD. Square cutouts were cut out of the chassis for the motor wires to connect the Arduino. We decided to use a tank steering system to simplify our design and reduce the number of moving parts, like a steering rack. Using this system allows for better steering radius as well.
Second Iteration
For our second iteration, ultrasonic sensors were mounted at each side of the car. The sensors in the front and back were mounted at the bottom so that the car would be more compact. A Raspberry Pi and PiCam camera module were used to get video footage.
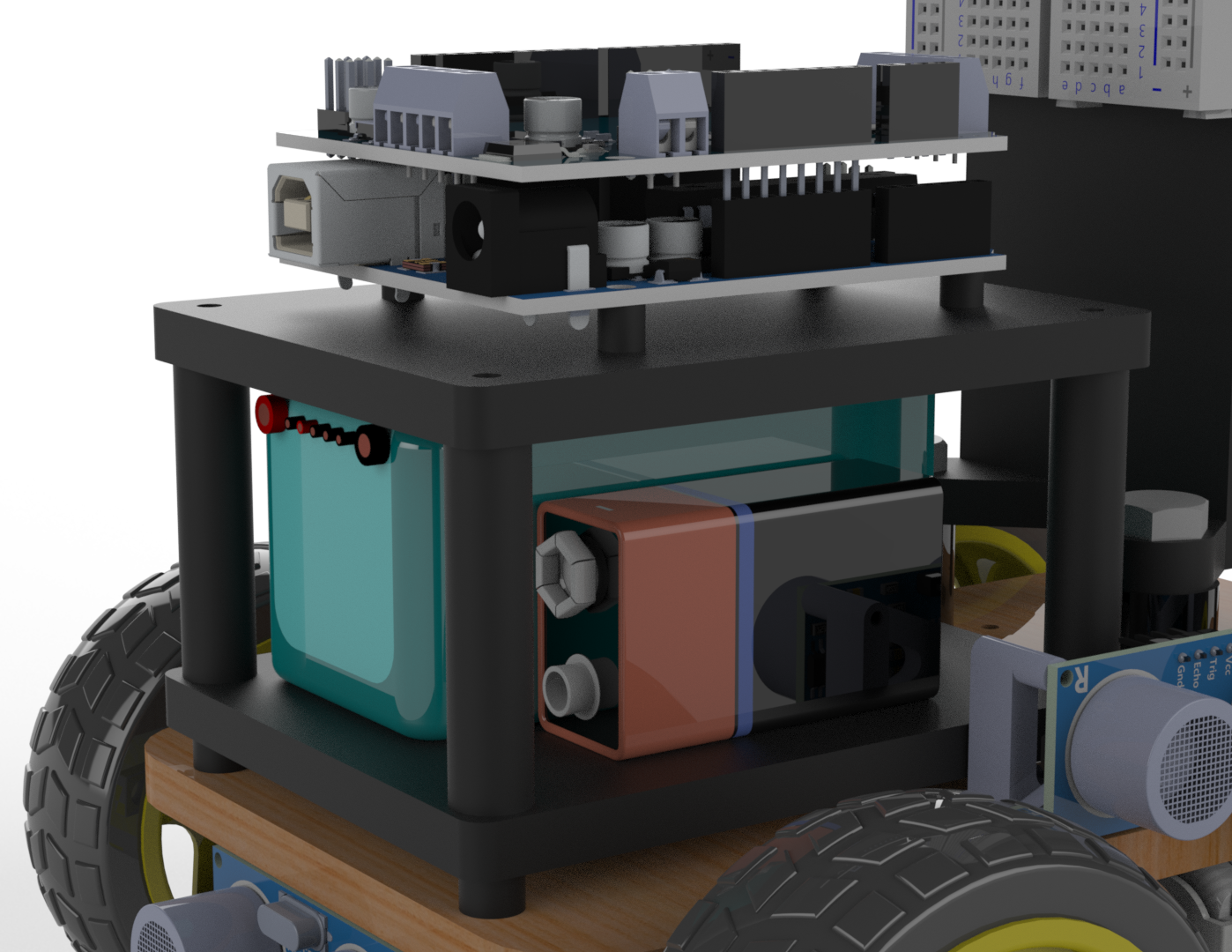
Third Iteration
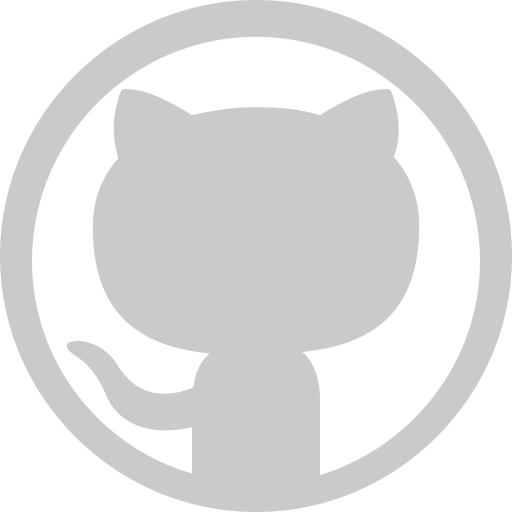
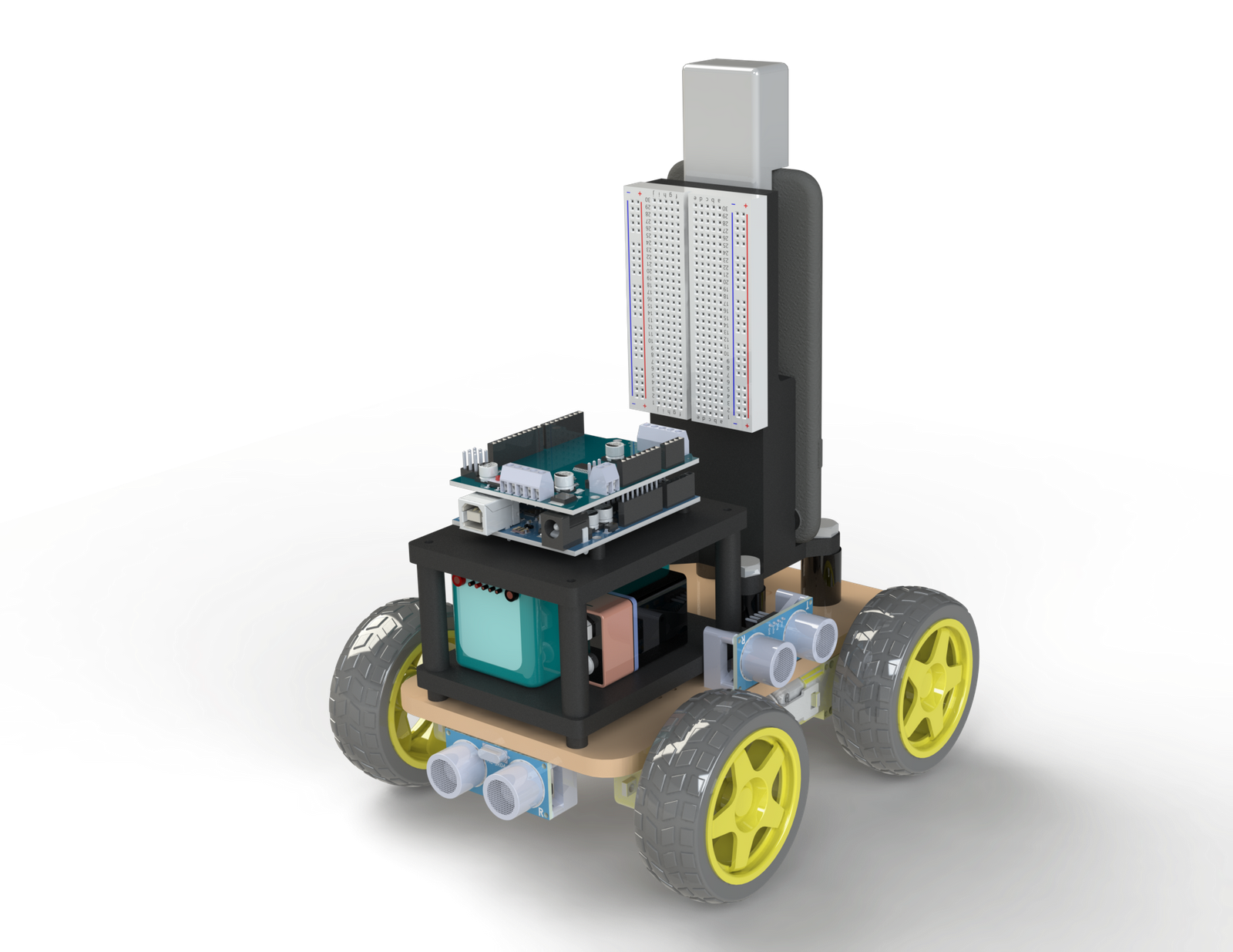
For our third and final iteration, we made a 360 camera mount with damping in mind to smooth out sudden acceleration/deacelerations and bumps that the car may encounter and reduce nausea when wearing the VR headset. The battery and arduino were mounted onto platforms to save on space and allow for space for wires from under the chassis to connect to the arduino.