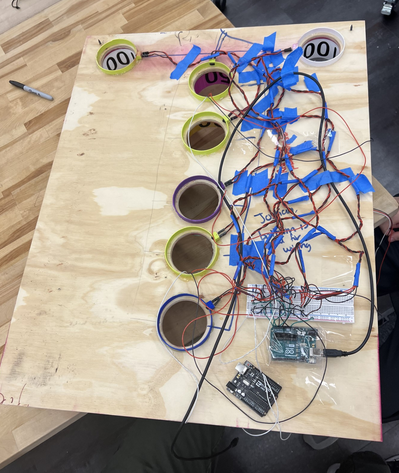
IR Sensors
To identify when the ball enters the scoring hole, we implemented Sharp IR reflective sensors. These sensors are designed with an operational range spanning from 2 - 15 millimeters, ensuring precise detection of the ball's entry into the hole. Each sensor consists of an infrared emitter and a phototransistor, which is directly influenced by the presence of light or an object approaching closely. The voltage decreases when an object enters its range, allowing us to accurately detect the ball in the hole.