Sprint 2
Sprint 2 Mechanical Design
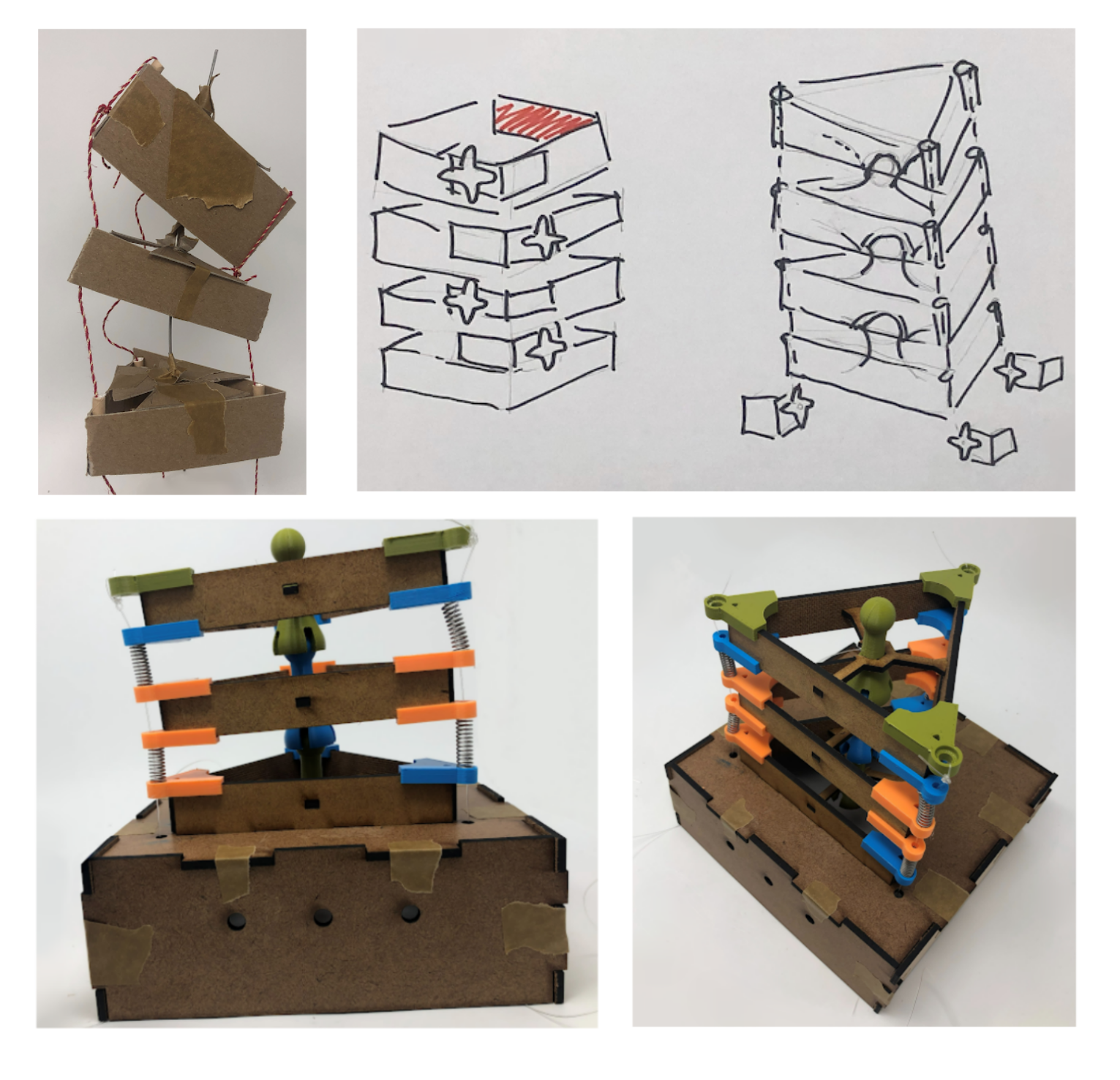
Between our first and second sprint, we decided to make a pretty big pivot in our mechanical design.
After discussing with the software team, we realized that wrangling six servos
was outside the scope of the project. They poses an issue because they would be under stress and
would get further and further away from their starting
position which would result in the servo no longer knowing where its home position is. This would
mean that the creature would be unable to return to its original
position and calibrating and tuning six servos would cause a lot of unnecessary complexity to our
design.
Our new design takes a different approach. Instead of having six servos, we narrowed it down to
three. These three servos will now pull down on strings attached to the frames of the
creature. This will mean that there will be less strain on the servos, and there will be less
complexity for the software team. This changes how the creature will actuate, but it should
still be able to make multiple organized behaviors with just the pulling of the strings.
One of the major concerns with this new design is tensioning the strings. Having improper tension
could completely mess up the creature's ability to move so we needed to make sure
to manage the tension appropriately. Another concern is that we needed the creature to bend
uniformly throughout the frames. As you can see in the cardboard sketchmodel in the top left corner,
without any padding inbetween the frames, only the top frame bends. We added springs in the gaps of
the frames to help the creature bend uniformly.
Sprint 2 Electrical Design
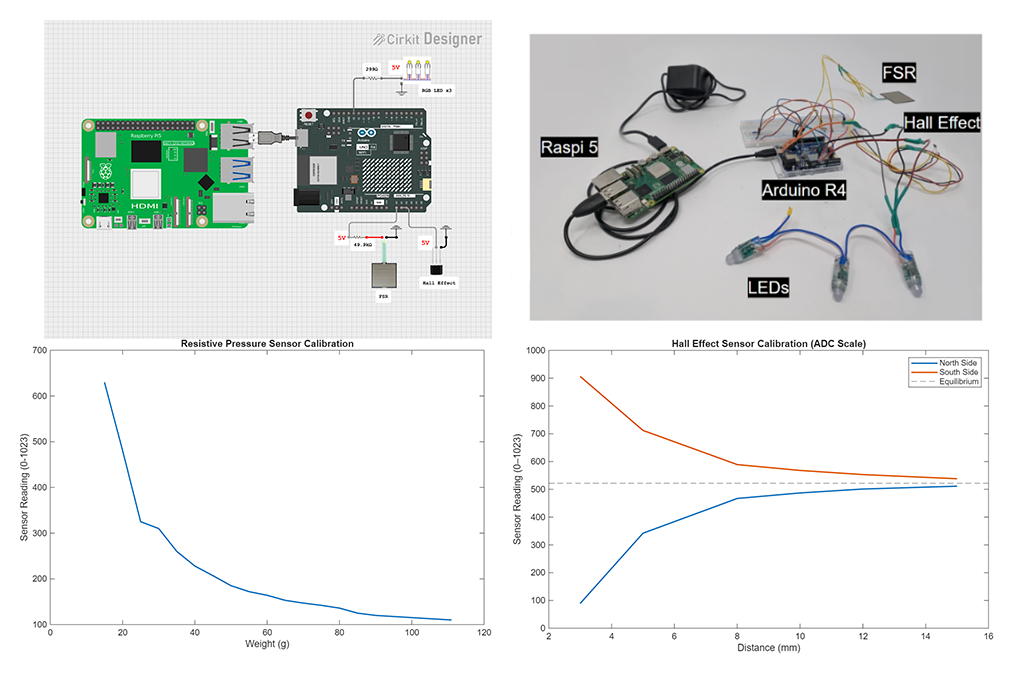
During sprint 2, we received and calibrated our hall effect sensor and force sensitive resistor. Above are the plots created with the data taken. This allowed us to create thresholds above/below which the creature sensed being fed or pet. We also got the pixel LEDs that we used in the final design. Additionally, we got the Raspberry Pi 5 up and running, which meant that our arduino scripts could be uploaded and compiled through the Pi. We got a good portion of the full circuit built, including the Pi, Arduino, two sensors, and LEDs. We already had the servos we used in the final design, but did not add them to the circuit due to currant draw concerns. This was around the time we transitioned to a different design that used fewer, but significantly larger servos. The previous servos were 60mA, and the new ones were 2A. Of the components we did wire, we stuck to running one or two at a time to ensure safety. It was around this time that we decided on a rough final circuit design, and started thinking about bigger power supplies.
Sprint 2 Software Design
.png)
For Sprint 2, we focused on integrating our new sensors and pivoting our mechanical design, so the only scripts that were written were for testing and calibrating the sensors. The control software for this section was purely theoretical, but it became much more fleshed out during this sprint since we had the necessary parts to gain clearer understanding of what the creature should do. The hardware that would have been used in this system is shown in the diagram.
While the overall loop appears similar to the previous sprint, the state change descriptions illustrate what each specific component would have been doing in each state and show that there were actually two versions of both the Sensing and Reacting states. One version supported the food loop, where the user selected the feed button and “fed” the creature using the hall-effect sensor, which the creature then reacted to before its hunger was reset. A second, parallel loop functioned similarly but targeted boredom instead, using the force sensor. These two action loops significantly increased the complexity of the system compared to the previous sprint.