System Overview
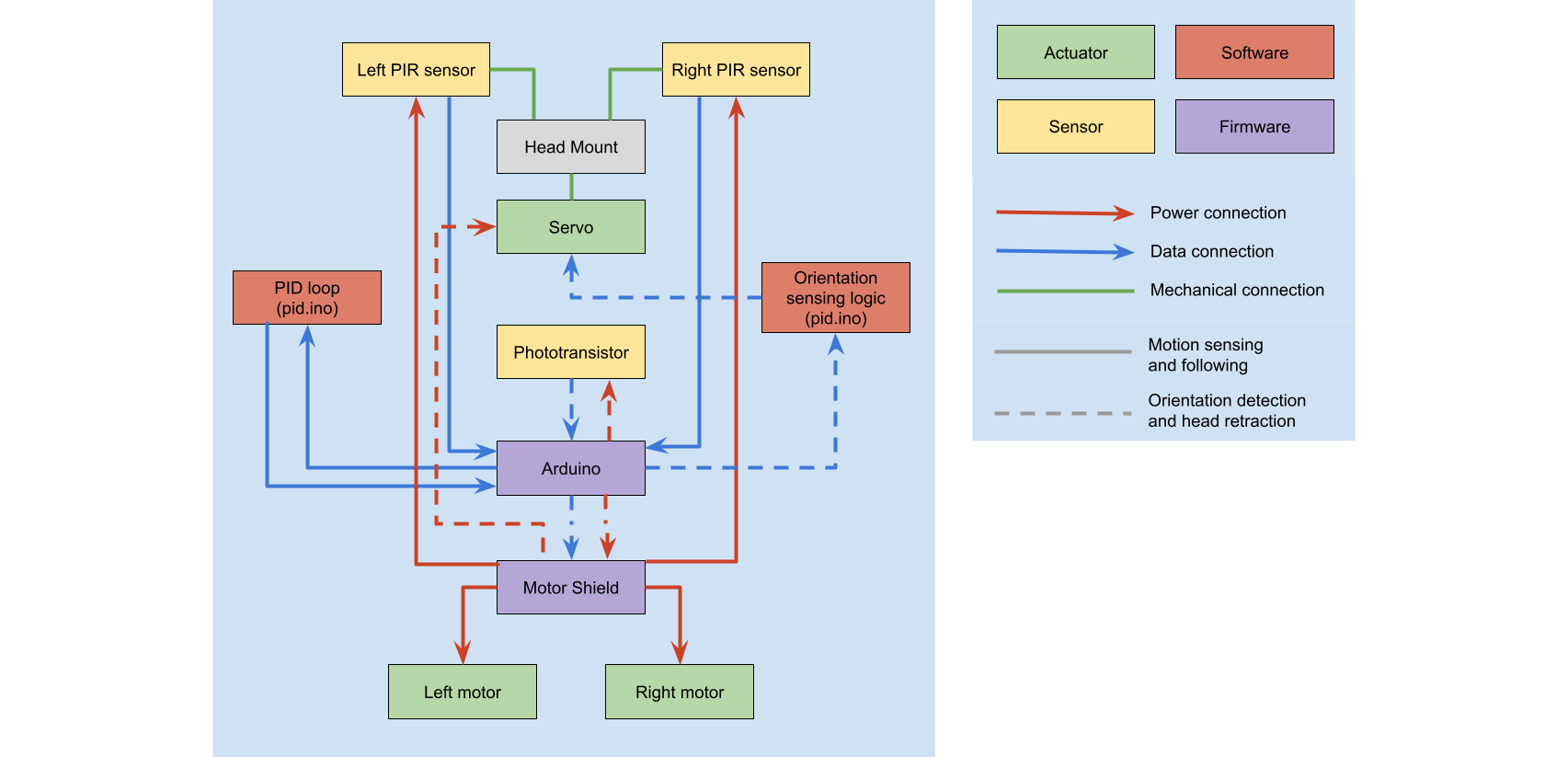
H.E.R.M.I.T. integrates mechanical, electrical, and software systems. Its two primary functionalities are (a) motion sensing and following and (b) orientation detection and head retraction.
Using two base plates and 3D printed mounted components, the robot's robust chassis holds all sensors and firmware in place. The robot's legs are driven by two powerful motors attached using motor mounts. The speed of each motor is determined by two PIR (passive infrared) sensors and a PID loop that computes the differential drive of each motor. The extension and retraction of the head uses a slot-slider mechanism attached to a servo. The position of the servo is determined by (a) the current servo position and (b) the value of the phototransistor on the bottom of the base plate mapping to light level (and thus orientation of the robot).