Goals
Mechanical Goals
- Test with found materials
- Build a single axle
- Build a motor mount
- Build a shaft
- Build several pulleys
Software Goals
- Write simulation to test designs
- Test computer vision algorithms
- Write basic control code
Deliverables
Simulation
The simulation was finished in the first week of the sprint. We didn't know exactly what kind of motion we were going for, so the simulation was designed with modularity in mind. The ability to tweak the physical parameters allowed us to test our different behaviors and find a final design that we were happy with.
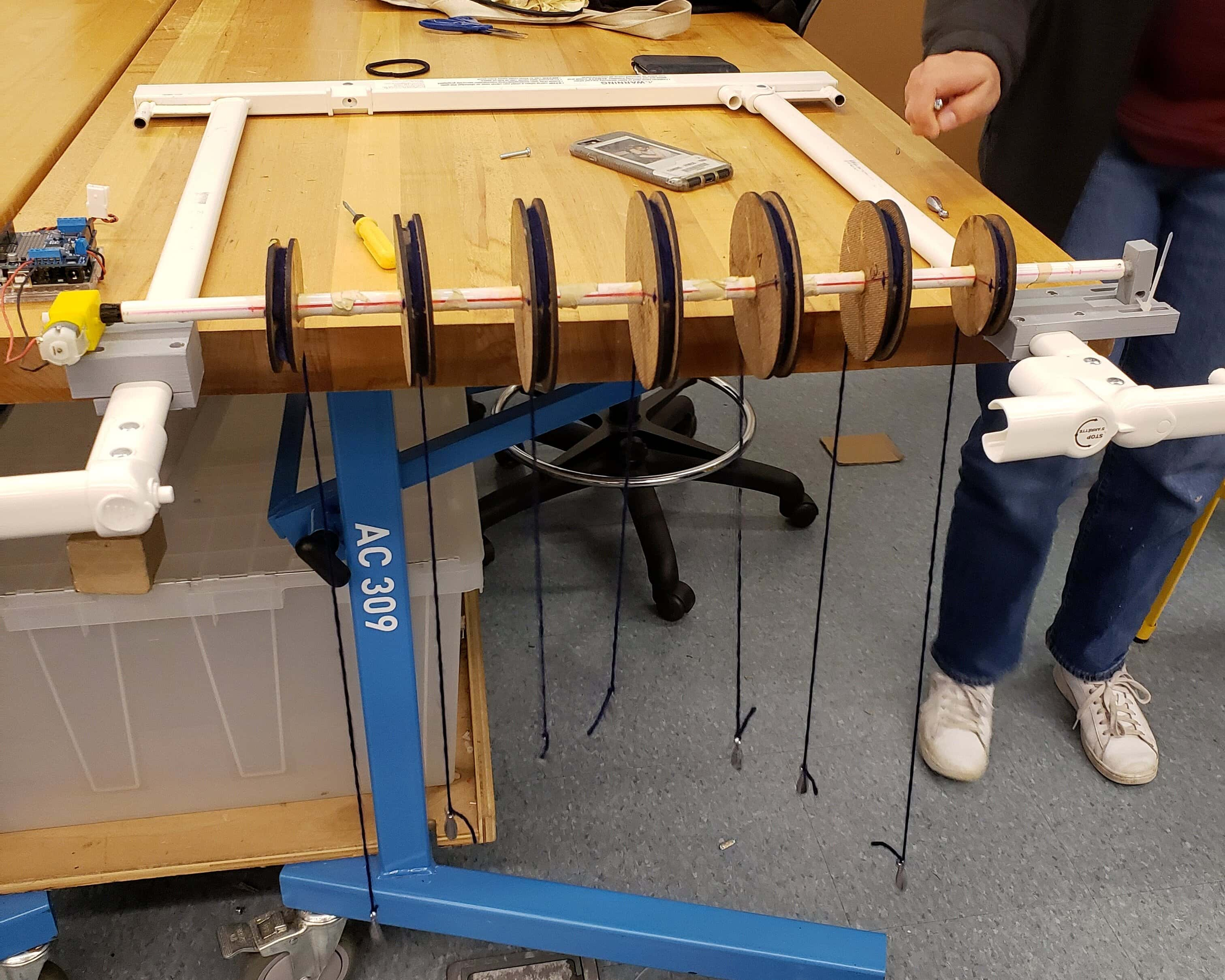
MVP
Our integration test was also successful. The visit to the recycling center yielded a ton of usable materials, including a golf shaft, several street signs, a baby gate and some wood. Once put together, we had a simple, scaled down model of our final product. We also integrated the software we had done so far - the MVP was hooked up to the Arduino, which in turn was driven by our Python script running a neural net for person detection. With this test done, we proved that both our mechanical and software systems were feasible.