Sprint 1
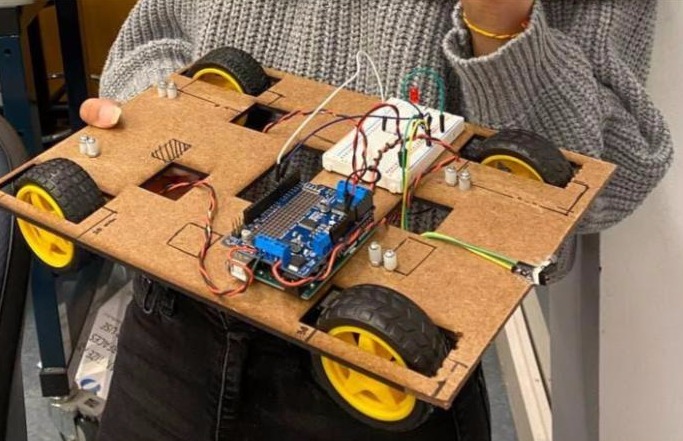
In Sprint 1, we wanted to have a functioning 2-wheel drive on a COTS drivebase that could react to bumping into a wall via a tactile switch making contact with a hard surface. As a stretch goal in this sprint, we wanted to move to 4-wheel drivebase with an integrated electrical component (a tactile switch connected to the drivebase). More details on the Sprint 1 page!