Mechanical Components
Chassis
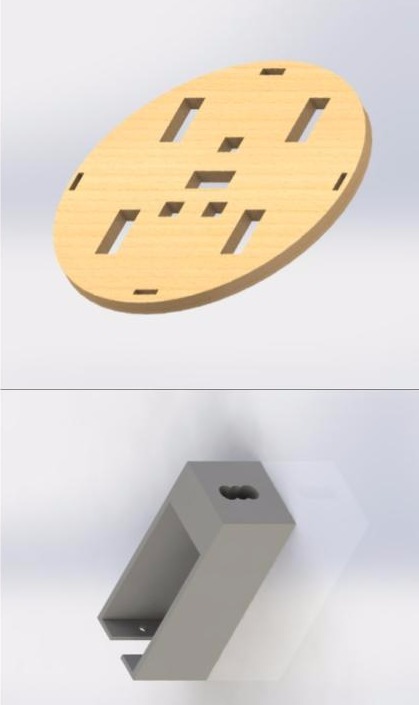
The chassis was created out of plywood by using the ShopBot to carve out spots for the wheels and electronics. An inch thick piece of cardboard was used in order to make the chassis more durable and able to carry more load as it has to withstand bumping into walls and carrying a large mount for the hand sanitizer dispenser. There were holes in the chassis carved out in the chassis for mounting the wheels and allowing wires to pass through from the Arduino to the motors. The wheels were mounted by drilling holes into the chassis and using a bracket that has holes to mount to the motor as well as threaded holes to place screws into.
IR Sensor Mount
Just drop the blocks into the page, edit content inline and publish - no technical skills required.
Dispenser + Mount
The hand sanitizer dispenser we acquired was found on Amazon. In order to mount it to the chassis of Sanibot, we created a hole in the chassis where two piece of plywood were screwed in using wood screws. Then a longer piece of wood was screwed into the two smaller pieces of plywood in order to allow the mount for the hand sanitizer dispenser to have some additional height and a stronger base. Then, the hand sanitizer dispenser was attached to this longer piece of wood using metal hooks.
Cover
The cover of our chassis was created by wrapping a thick sheet of plastic around the base of the chassis. The sheet was earlier colored with paint. Then, a plate was laser cut using acrylic. The plate had a hole for the hand sanitizer dispenser mount. The plate was glued on top of the plastic base attached to the chassis.