Full Electrical System
Overview
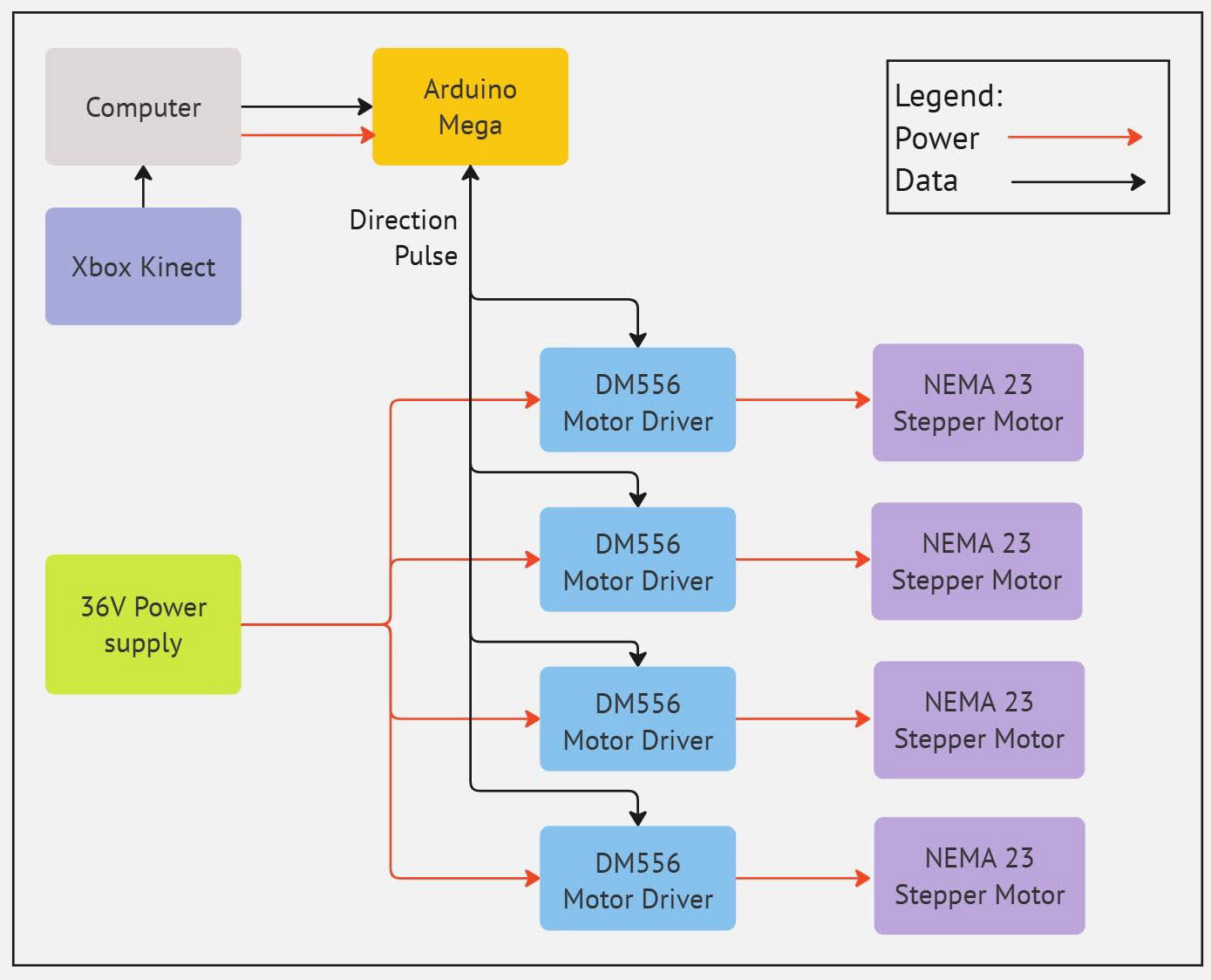
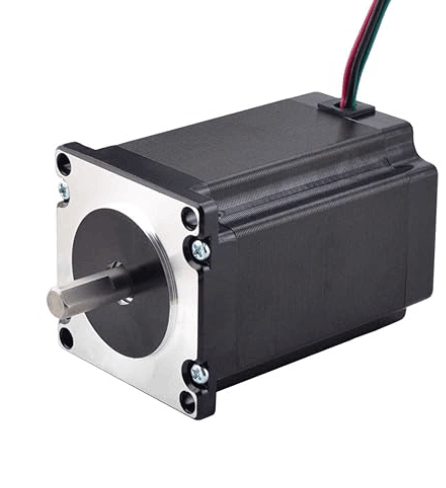
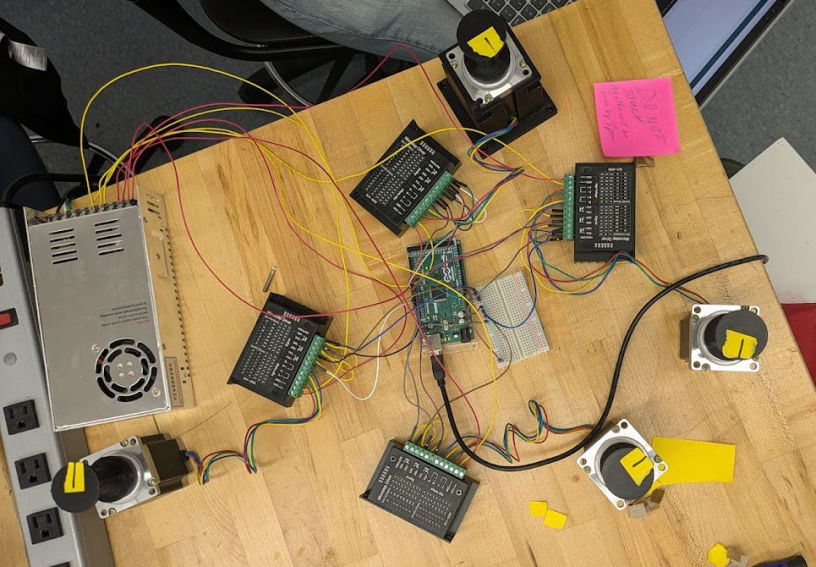
Our electrical system integrates robust components to ensure smooth and accurate operation of the backboard. NEMA 23 stepper motors and DM556 microstep drivers provide precise movement, while the Kinect sensor simplifies 3D positioning.