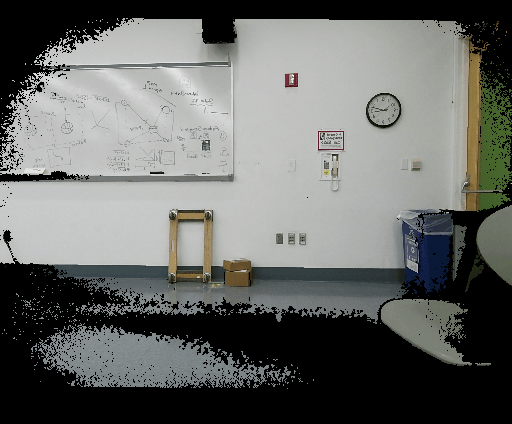
Example Reference Image
Initial Setup and Calibration
The system begins by capturing a reference image and point scan as baseline data. It then either loads pre-existing calibration data for depth and hoop positioning or guides the user through a calibration process to establish the reference frame coordinates.