Our very first meeting!
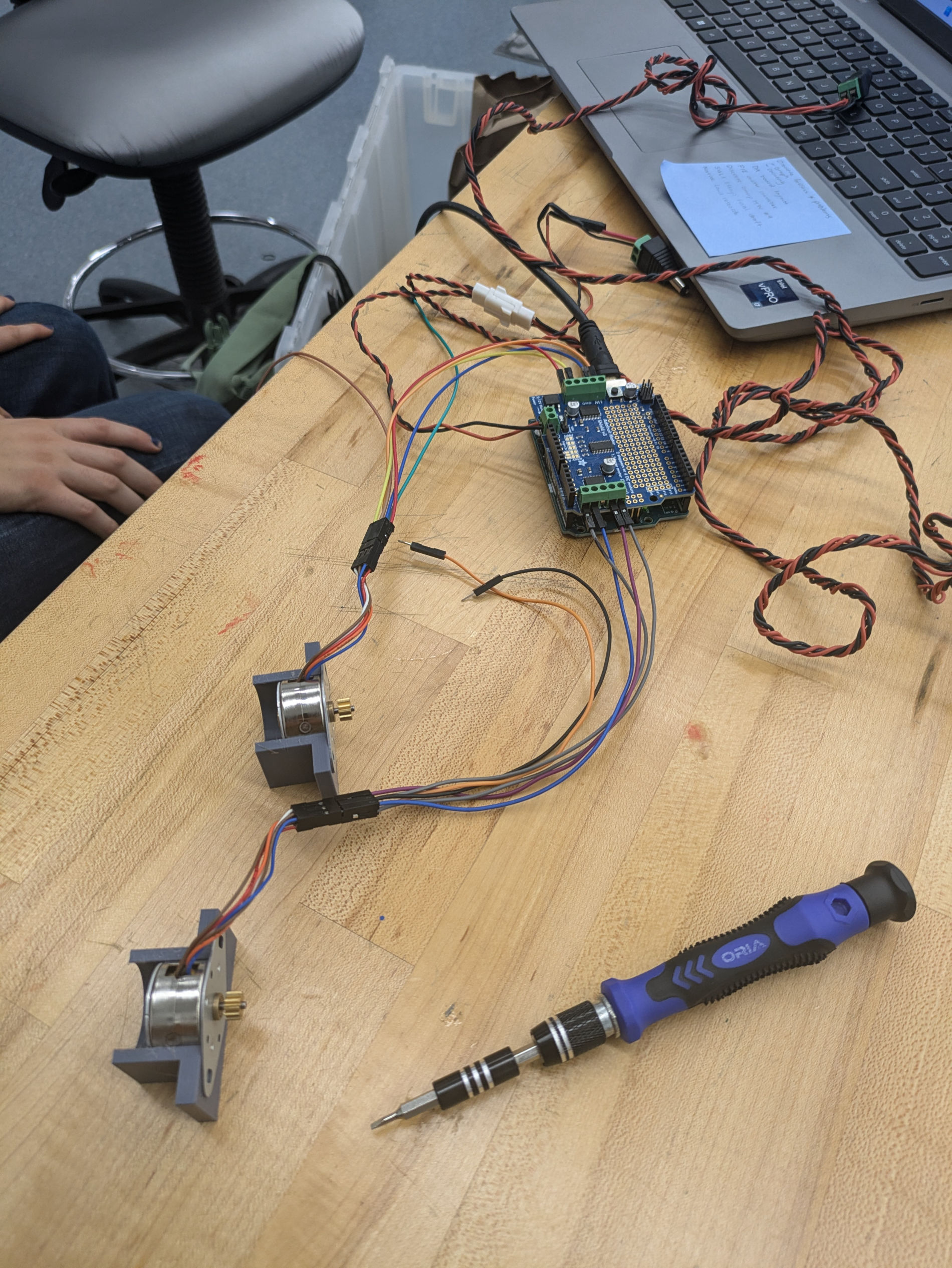
Our very first prototype! These motors moved a piece of paper in 1D.
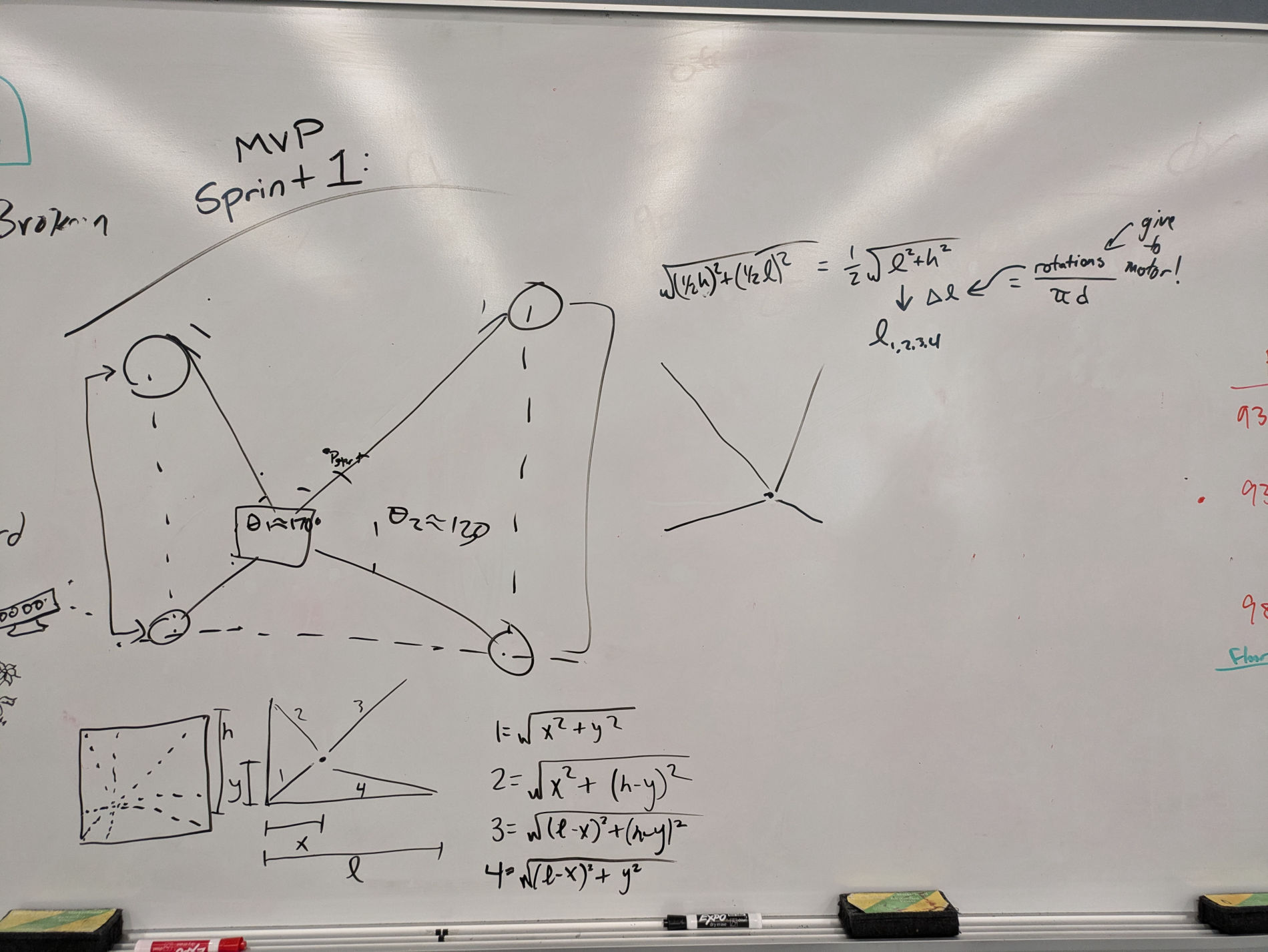
Our work deriving length of cables from board position.
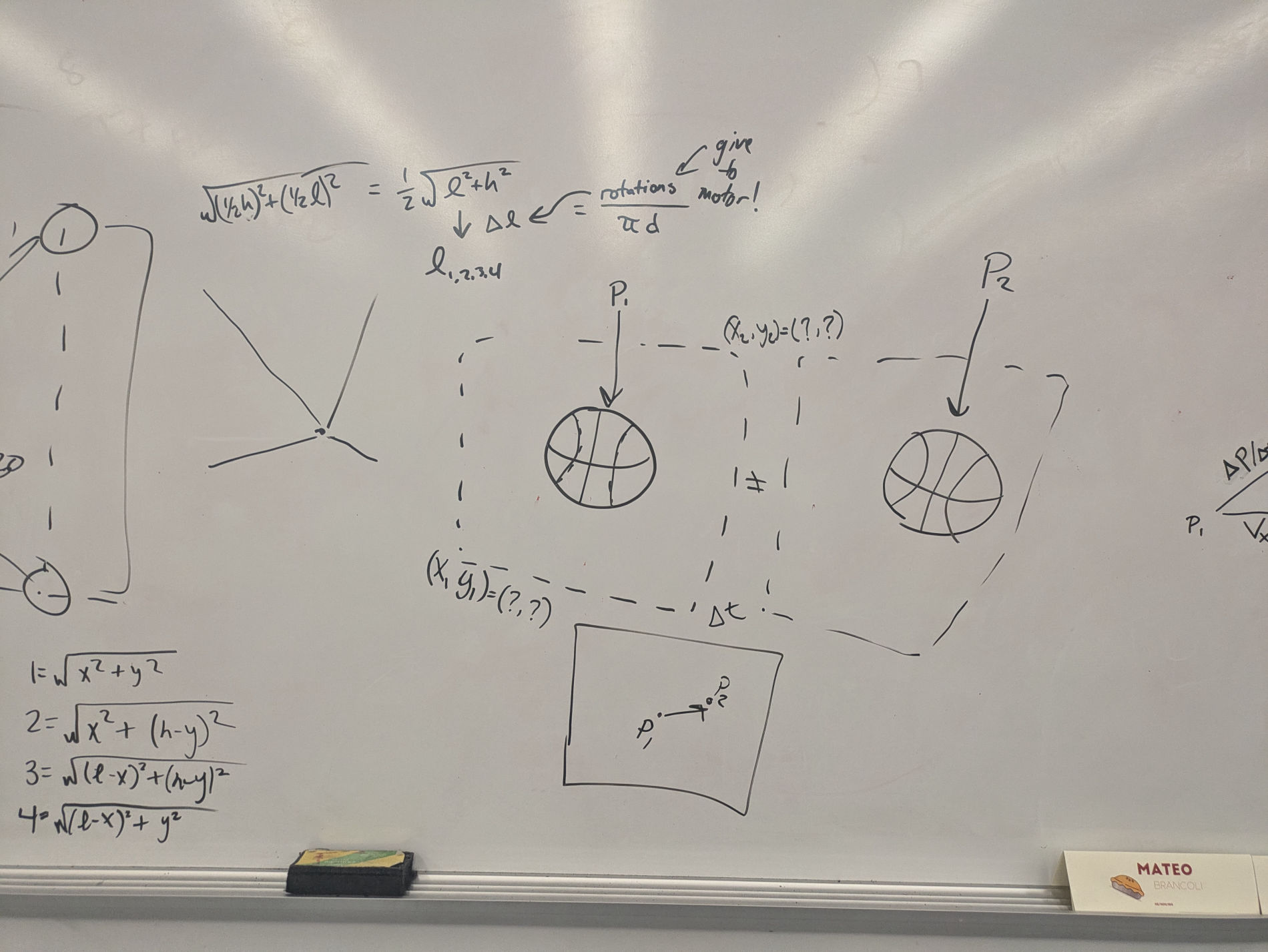
A sketch detailing how we can find change in position between frames.
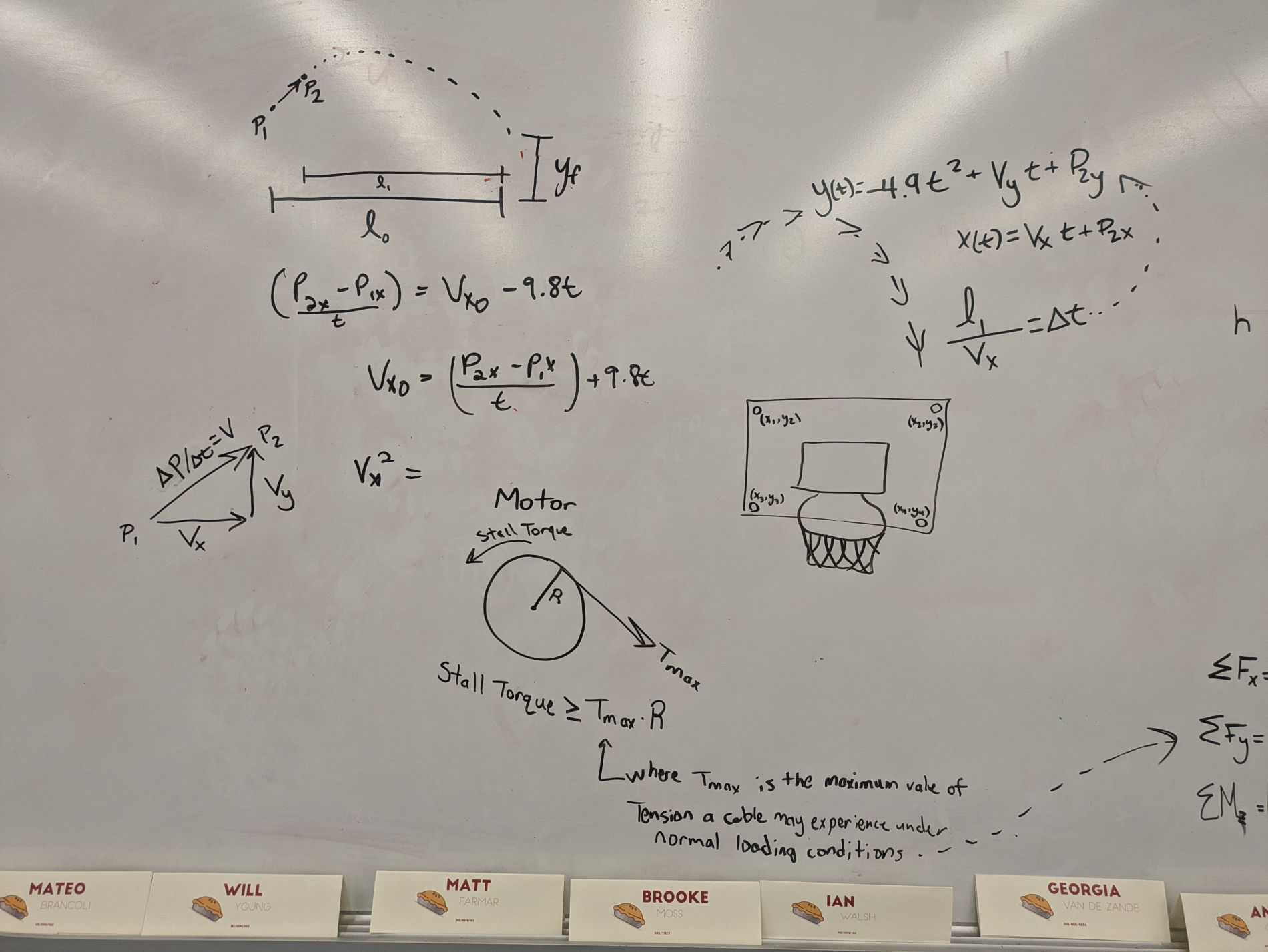
Our work detailing a kinematic model based on the change in position between frames.
Our work detailing a kinematic model based on the change in position between frames.
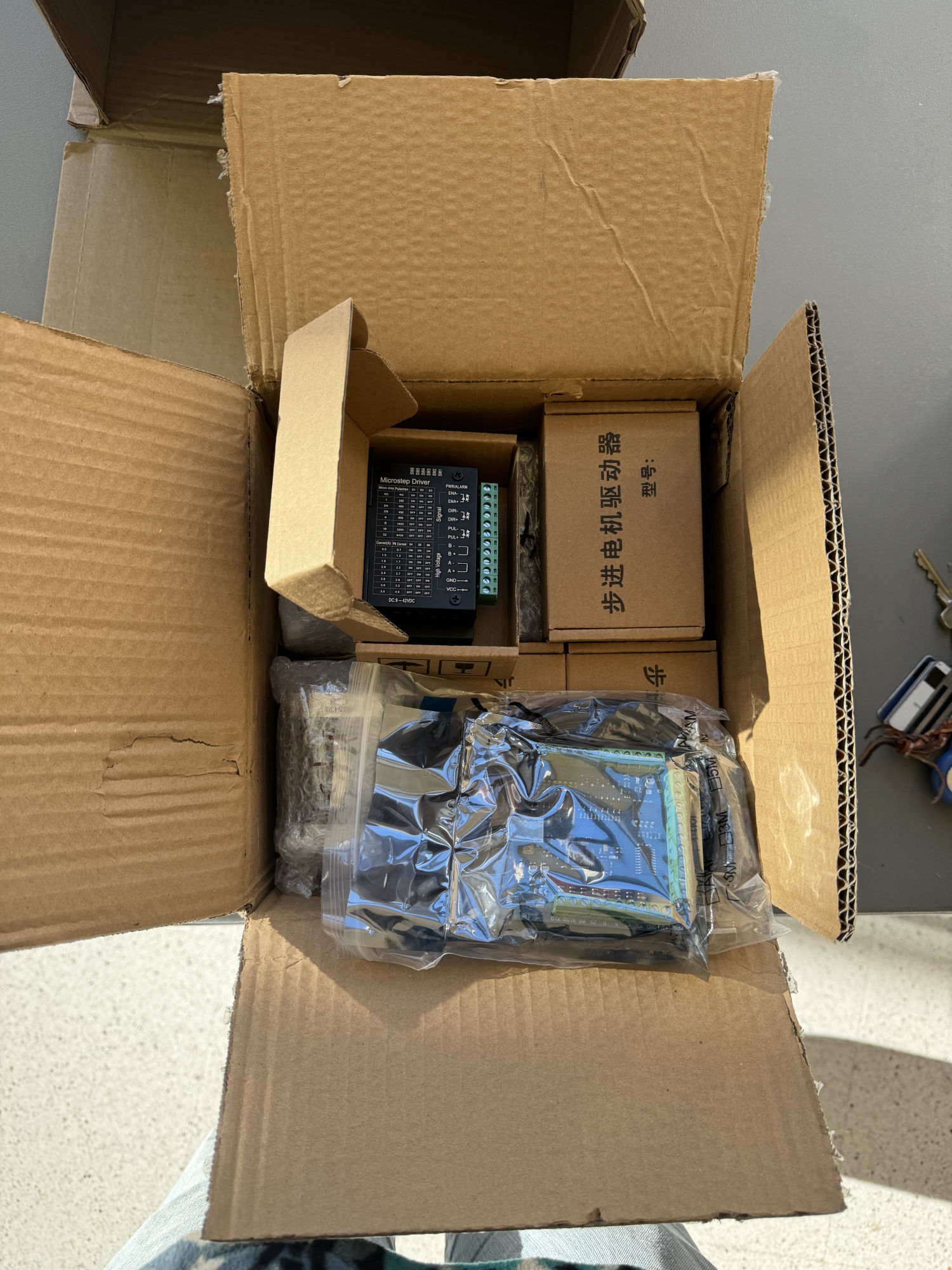
The electronic components we ordered for our Sprint 2 prototype.
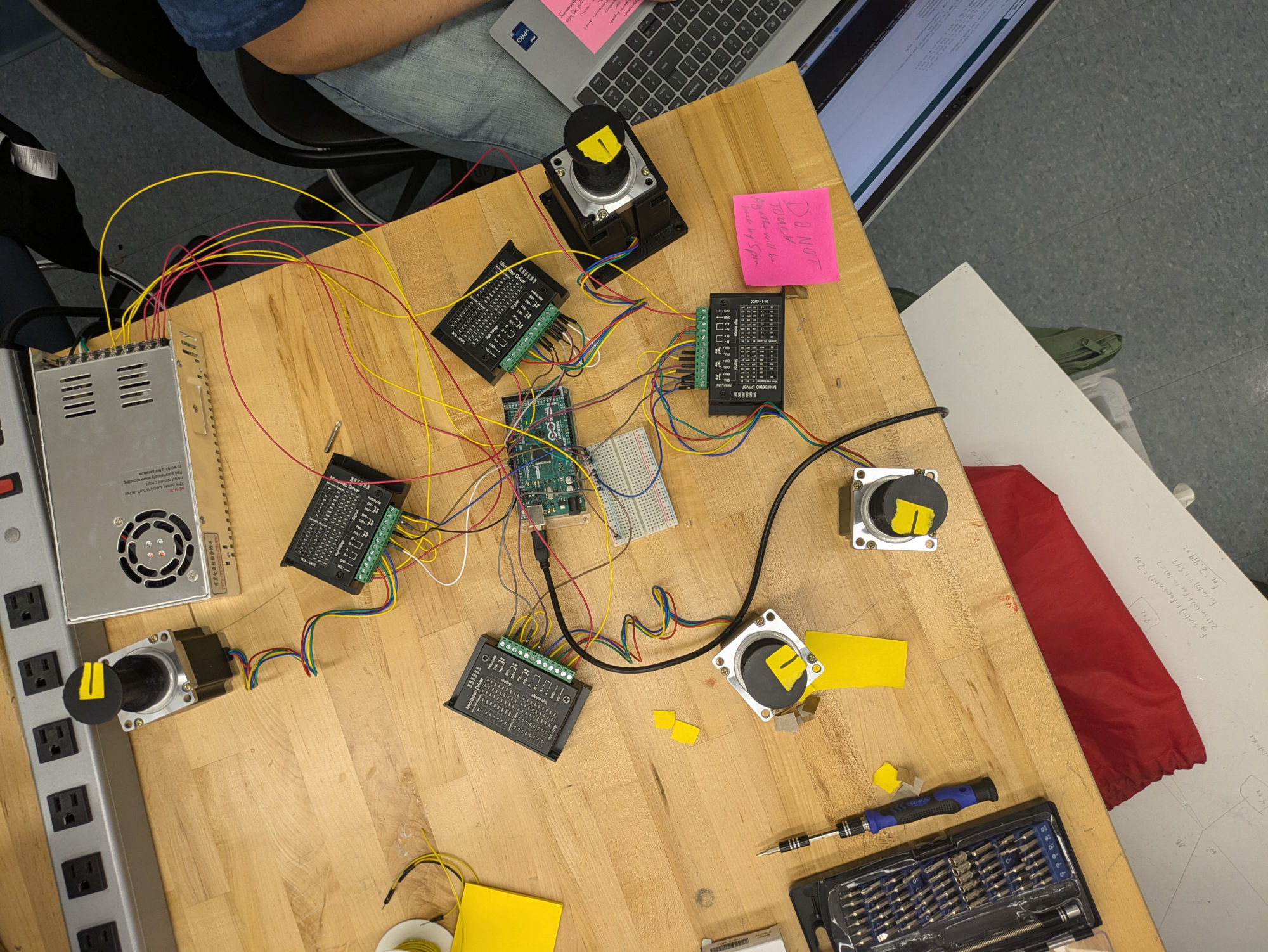
We worked to troubleshoot our electronic components for a lot of Sprint 2.

The mechanical team used the wood shop to create a frame from scrap 2x4s.
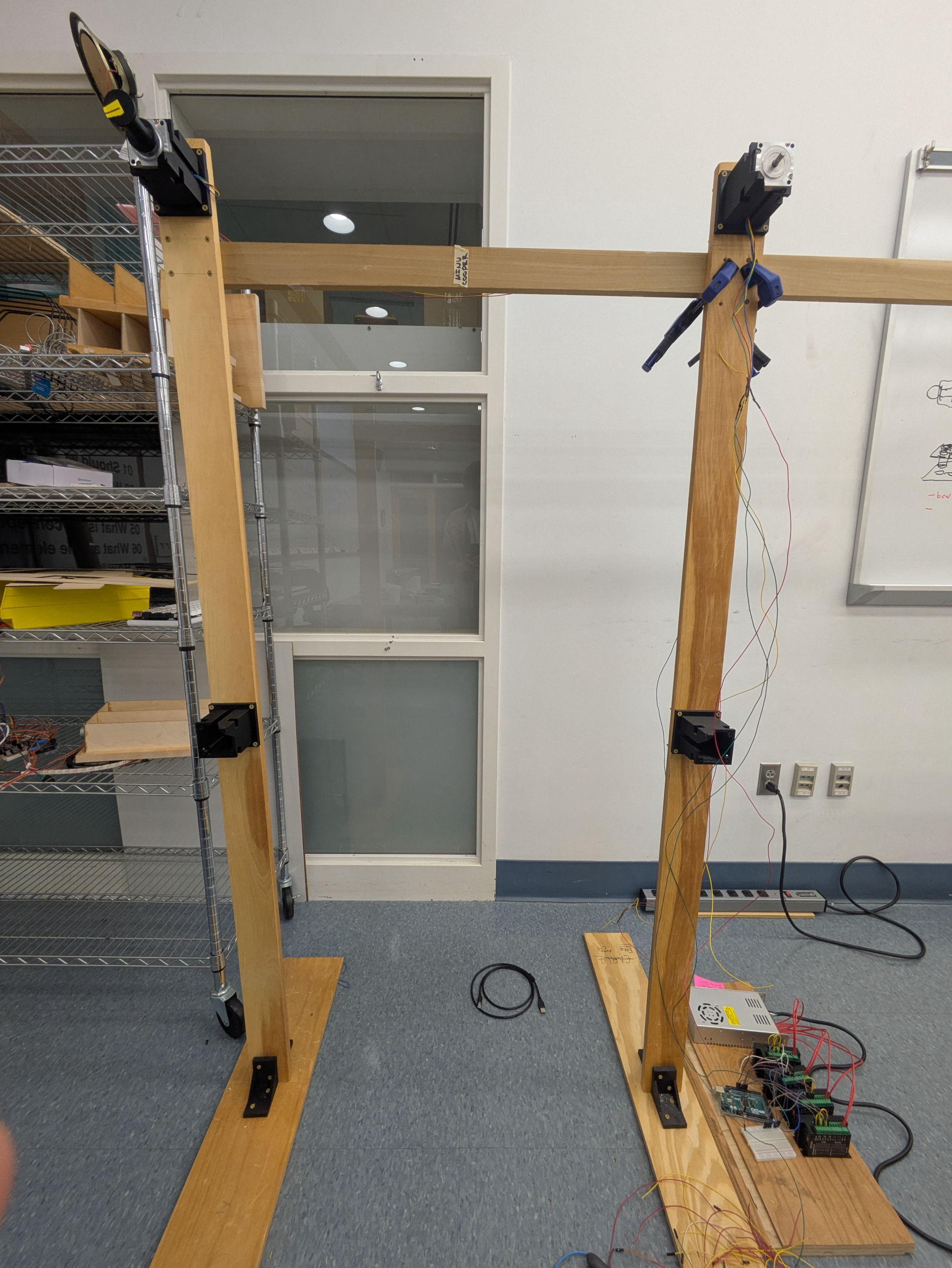
The Sprint 2 prototype frame with mounted motors.
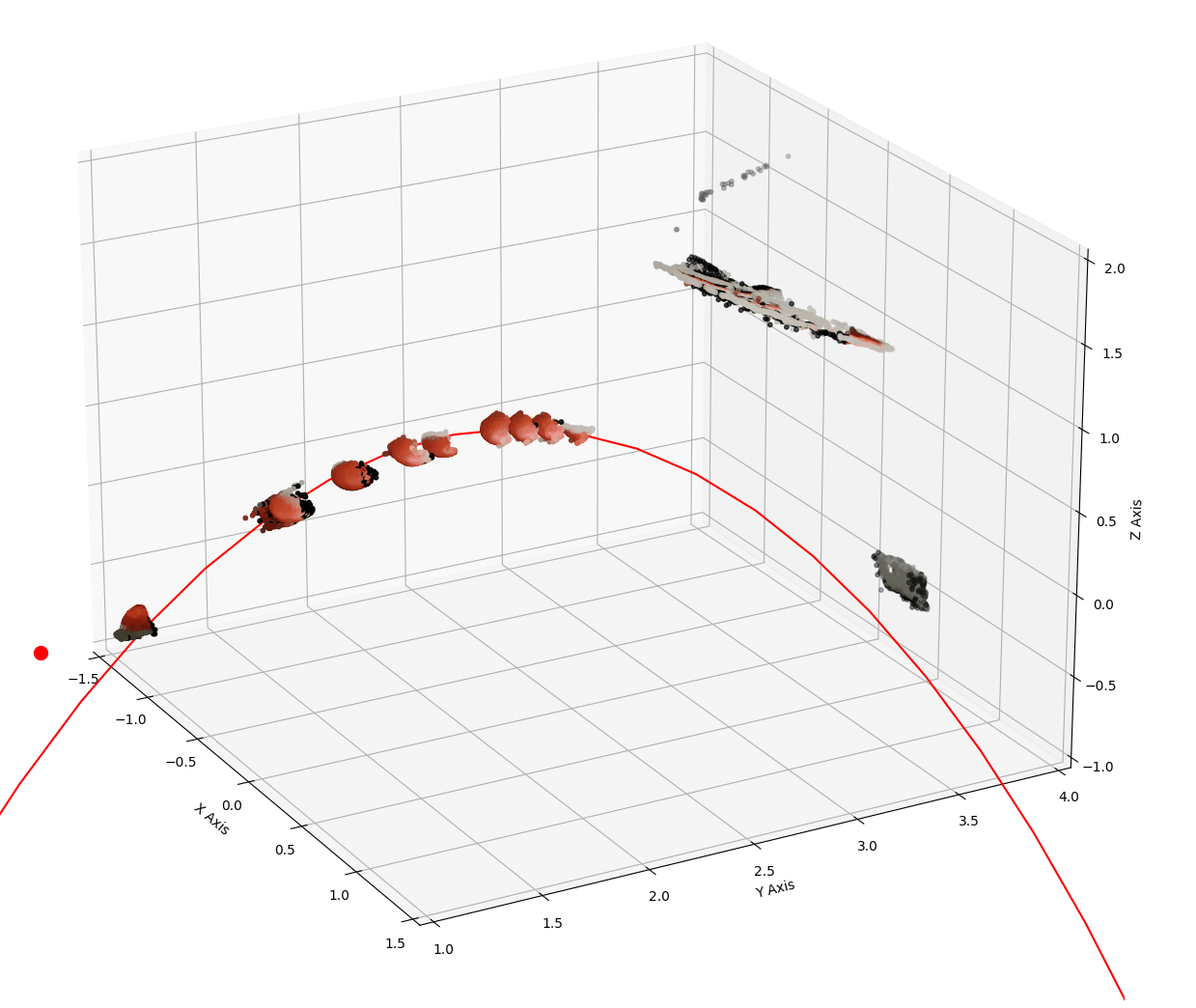
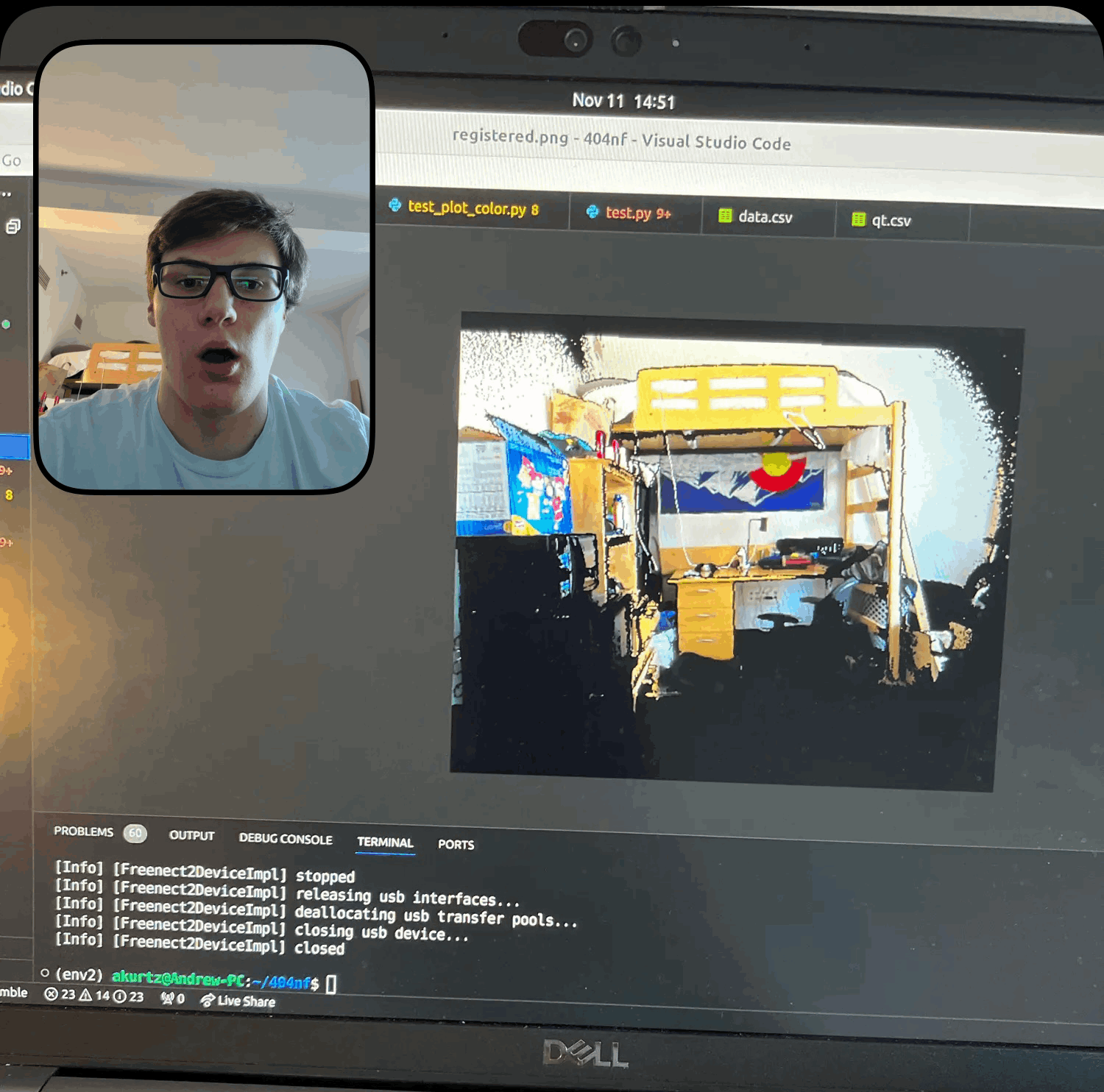
During Sprint 2, we used Kinect data to find the ball in each frame and fit those positions to a quadratic model.
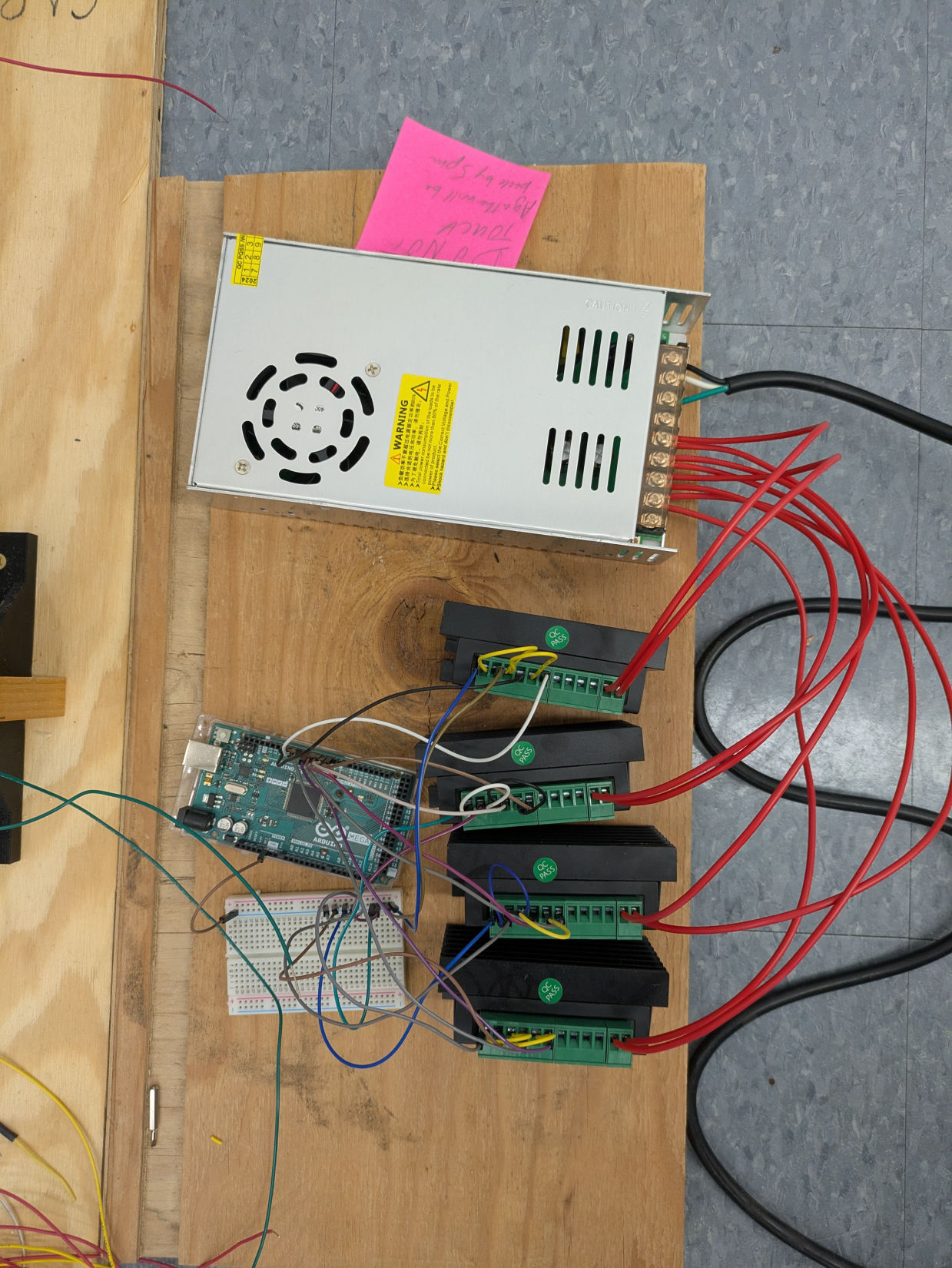
We got all electronics working and reliably controlled by an arduino in Sprint 3.
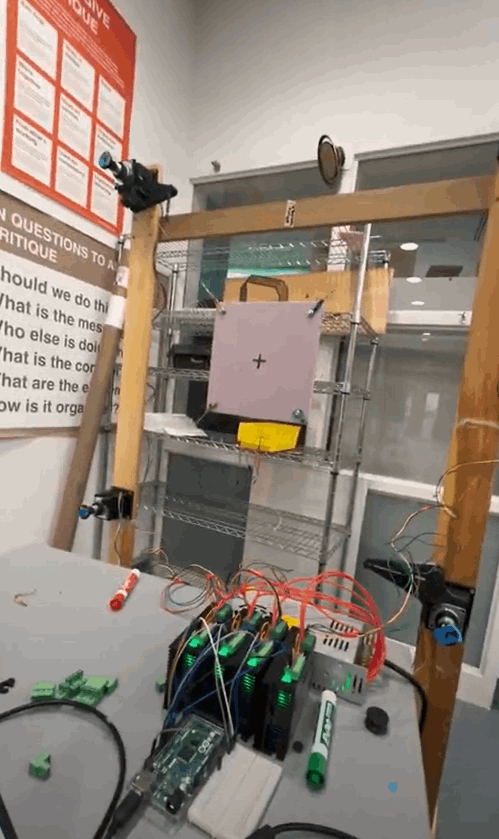
Our Sprint 2 deliverable - a mock up of the full mechanical system, with electronics connected.

During Sprint 3, the mechanical team created cable tensioners to help the system act more reliably.