Soil Analyzing Snake
A robotic snake that analyzes wildfire risk in forests.
A robotic snake that analyzes wildfire risk in forests.
Core goals behind each design decision we made.
Reduce any environmental impacts left by the snake, measure soil conditions to evaluate fire risk.
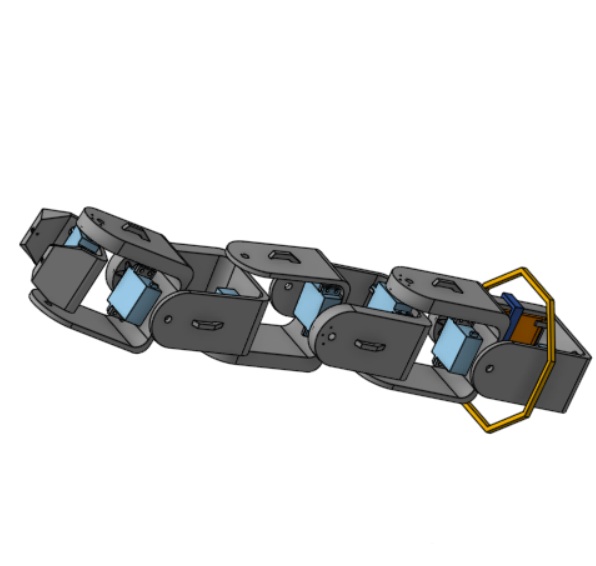
Design a modular snake that can be extended. Create an snake inspired movement pattern.
Create a dashboard to display real time soil moisture and temperature while allowing the user to remotely control the snake.
The objective of our project was to create a robot, inspired by a snake, that takes measurements to evaluate soil. We designed it to be used in the context of evaluating risk of forest fire. The equipped sensor is therefore a moisture sensor, and measurements map to the user's dashboard so that they can see areas with dry soil. We drew inspiration from snakes in terms of the three styles of motion that the snake performs, all exhibited by species of snakes.
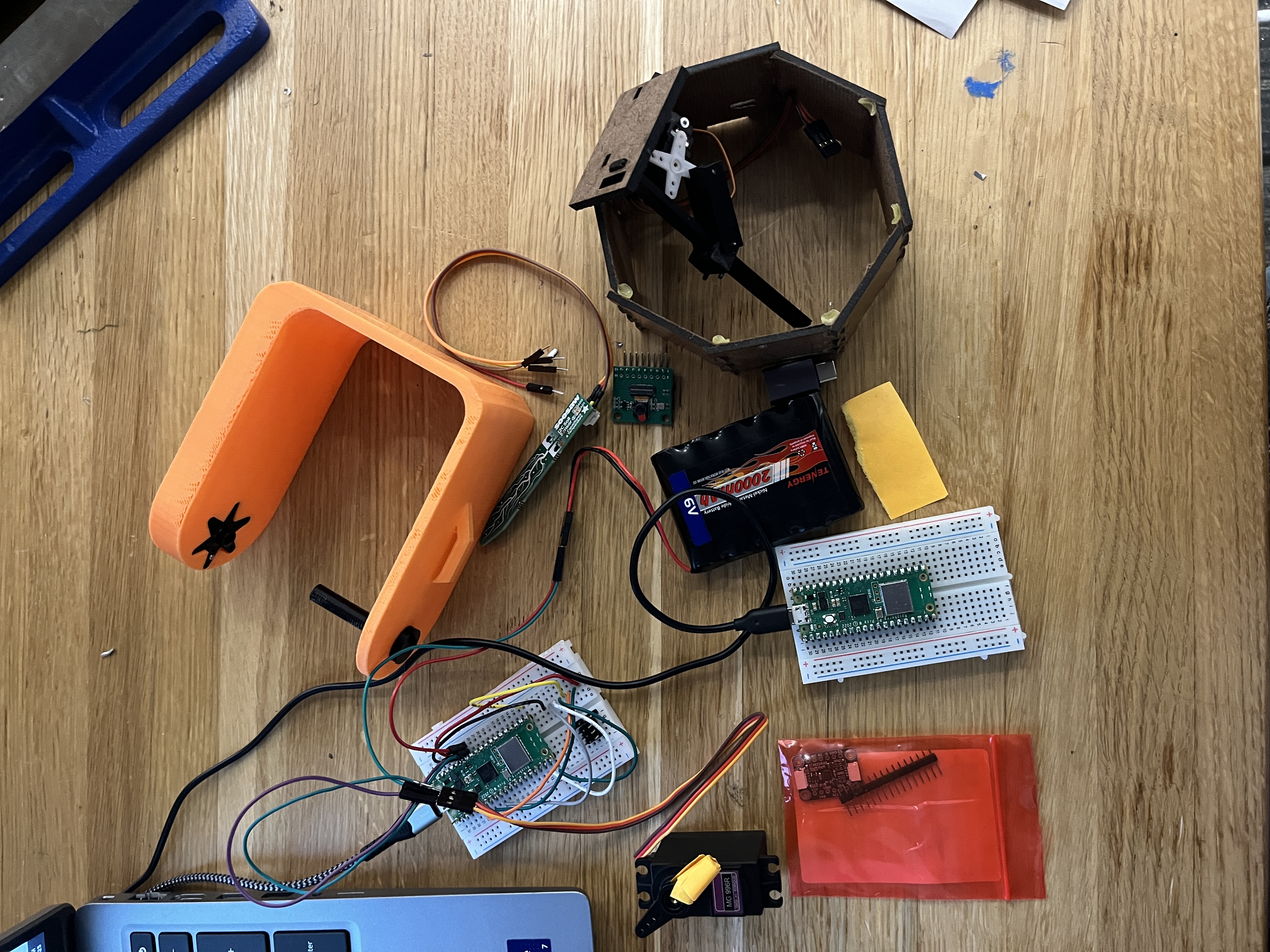
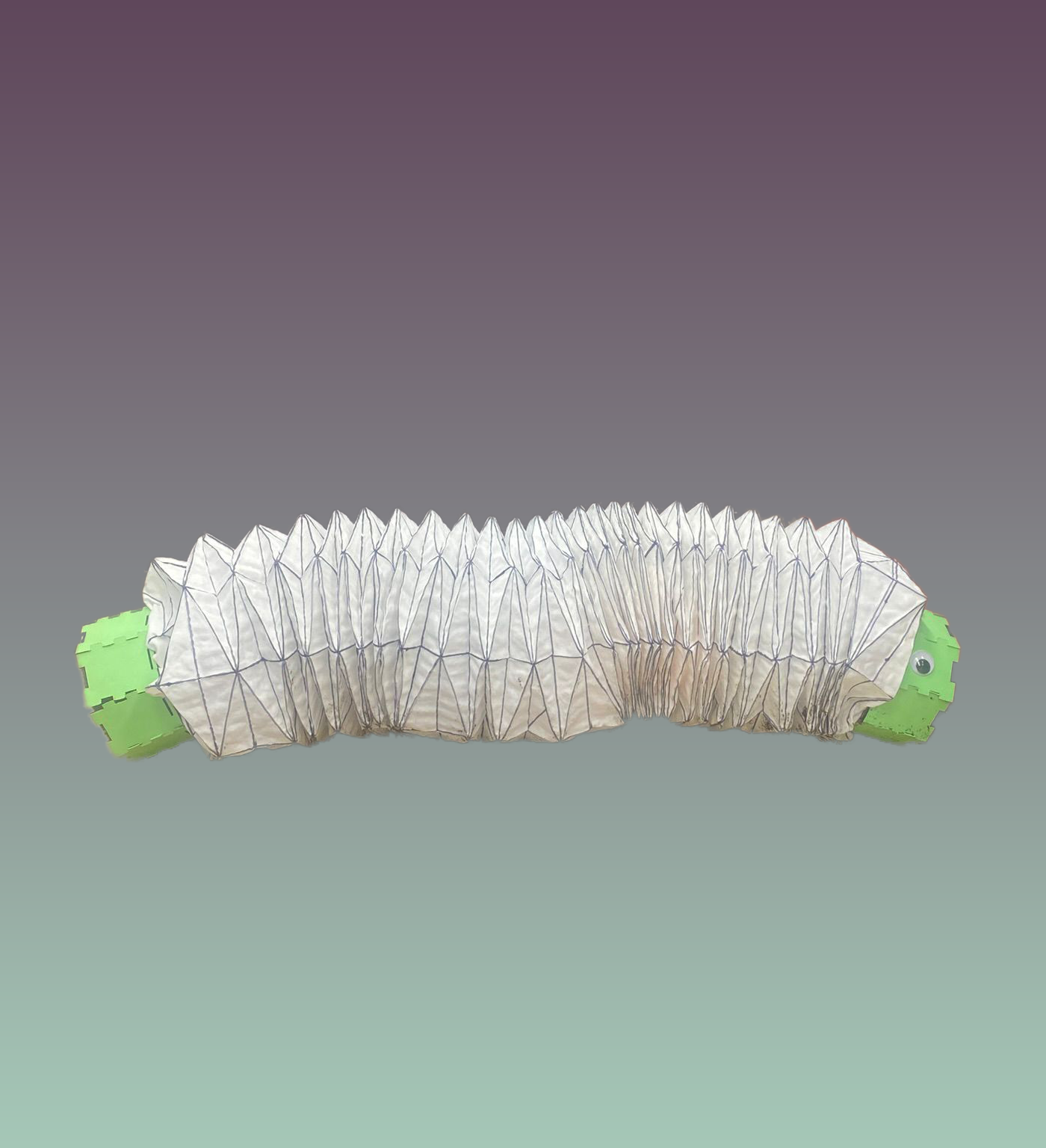
System OverviewUnfortunately, our pico that was controlling the motors burned out and stopped connecting via cable or via wifi so it was not operational on demo day. This video show the snake moving with its skin but not its head attached.
Read more about how we designed the snake to move and keep it water/dirt resistant.
Read more about the math that brought the snake movement together and how we integrated a dashboard for users to both monitor data and control the snake.
Read more about how we chose electrical components, connected them all together, and how we wrote firmware to control the snake.