Overall Goal
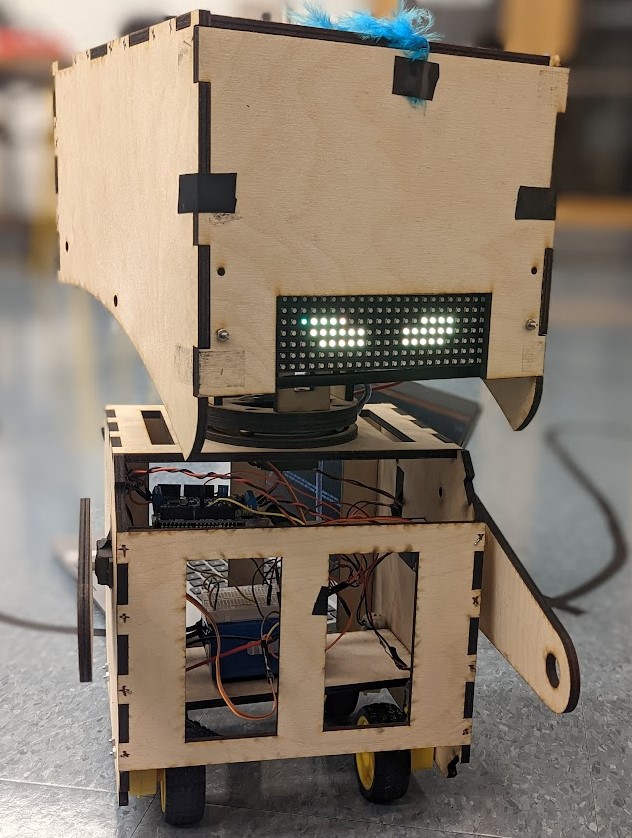
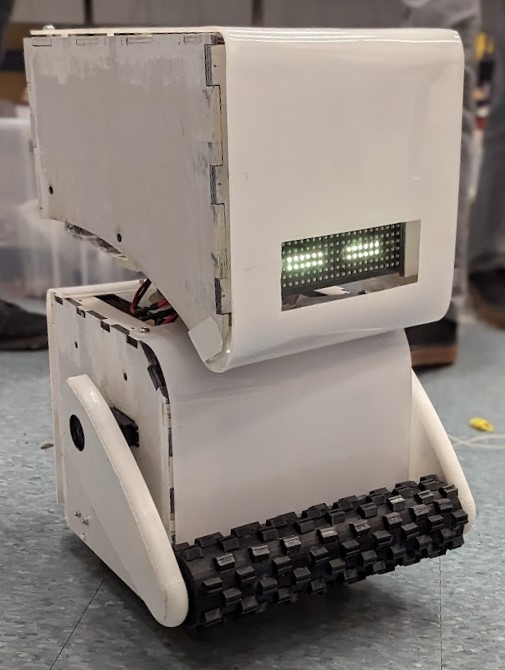
Create a robot which resembles and moves around like M-O from WALL-E.
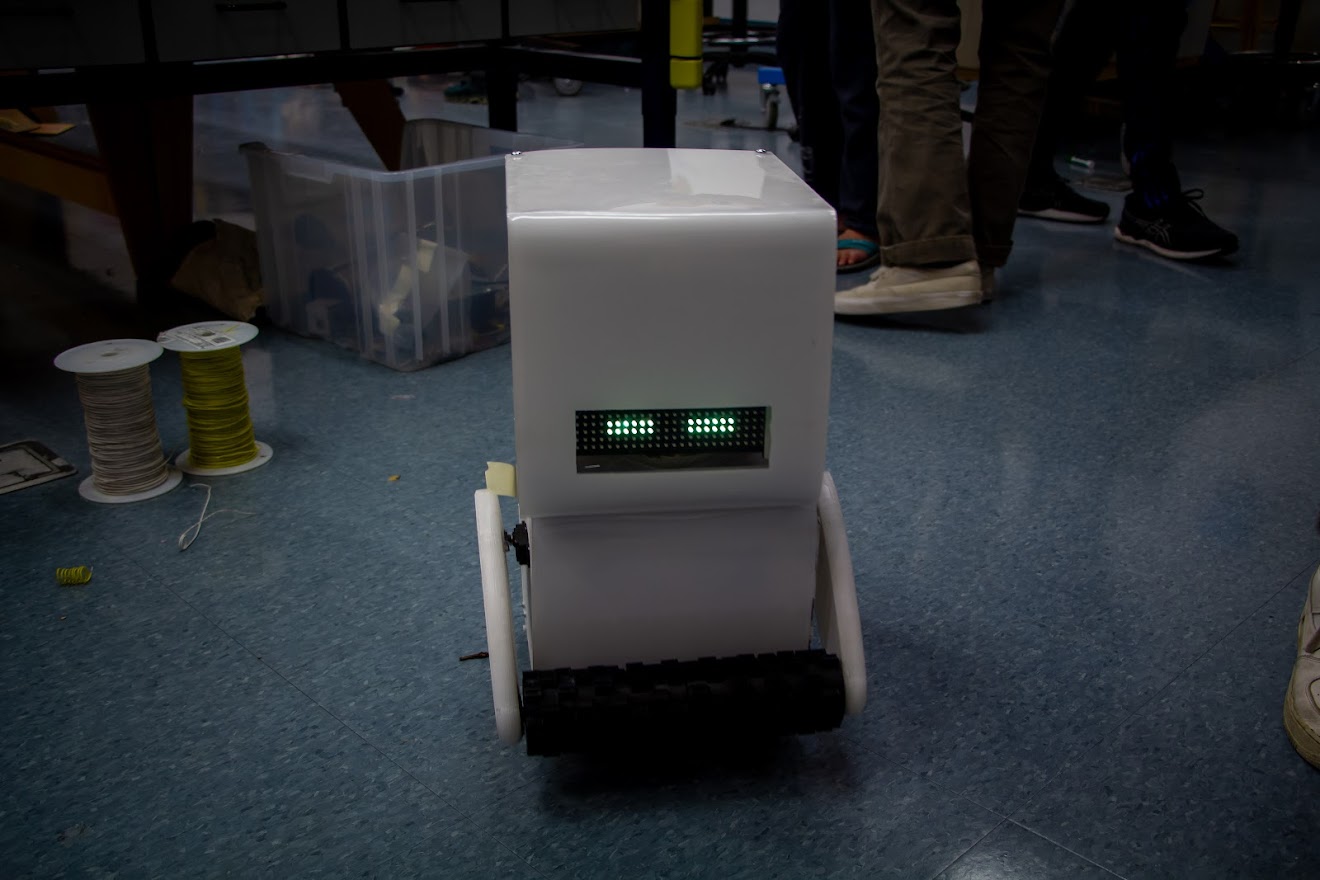
Create a robot which resembles and moves around like M-O from WALL-E.
*Highlighted sections in the strech goals were completed successfully.
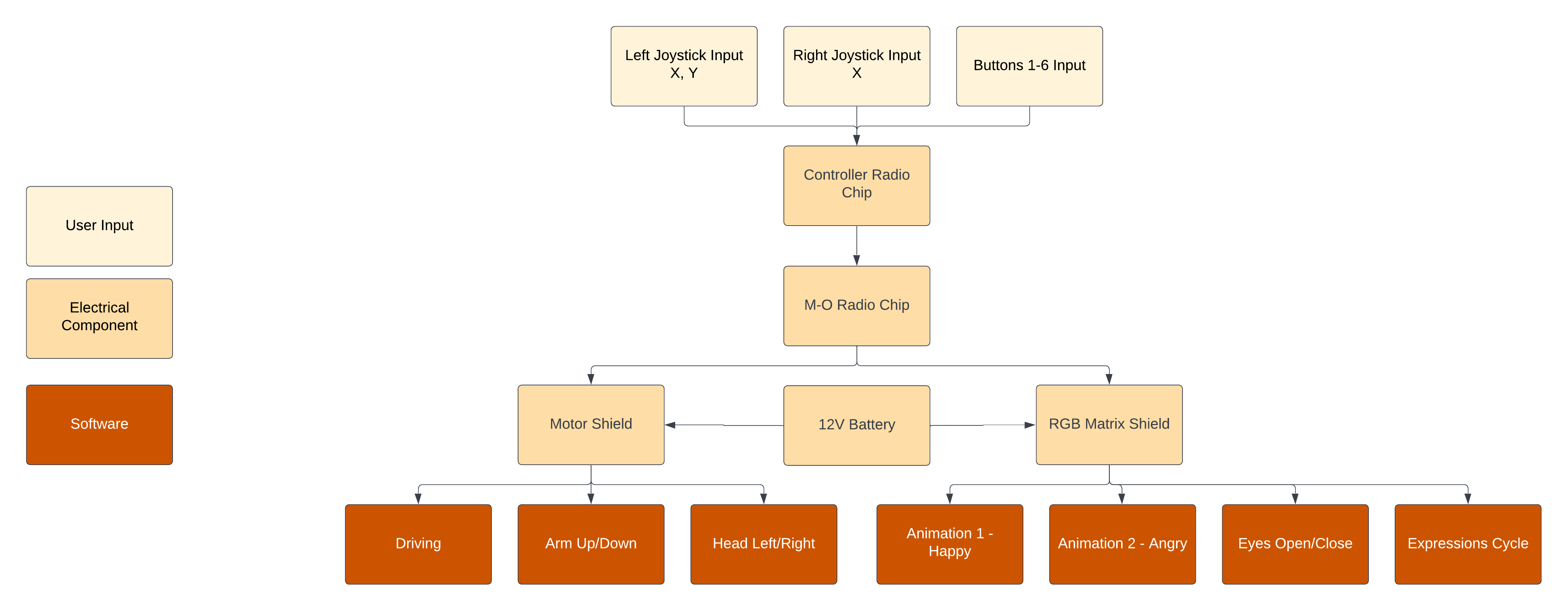
The robot's motions and actions are determined via input from a remote controller, which is then sent to a motor shield and RGB Matrix Shield.
Mechanical Goals:
Electrical Goals:
Software Goals:
Mechanical Goals:
Electrical Goals:
Software Goals:
Mechanical Goals:
Electrical Goals:
Software Goals:
Mechanical Goals:
Electrical Goals:
Software Goals:
The software challenges involved writing code for various electrical
components, including
radio chips, joysticks, buttons, motor controllers, dc motors, servos, and an LED
Matrix.
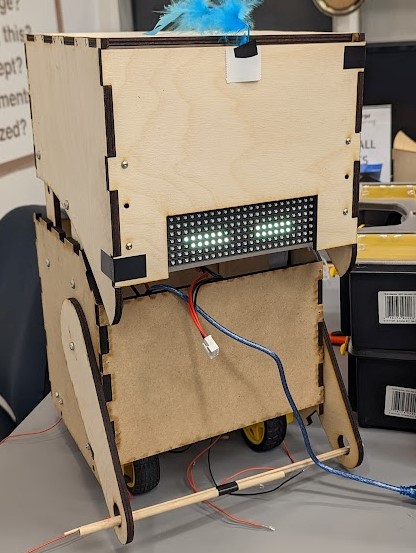
The electircal challenges involved determining a chargable battery
to run M-O unteathered,
finding components for all of the implemented features M-O has in the movie, and ensuring
clean wiring.
The mechanical challenges involved designing M-O's body and head in
order to match the movie
as closely as possible and
providing fixtures for electrical systems.
Financial information for the features that were present in the
final version of M-O. Parts that were acquired free of cost were included with approximated prices.