Stepper Motor Logic
For the full firmware code, see the stepper_pan_tilt folder in our GitHub Repo.
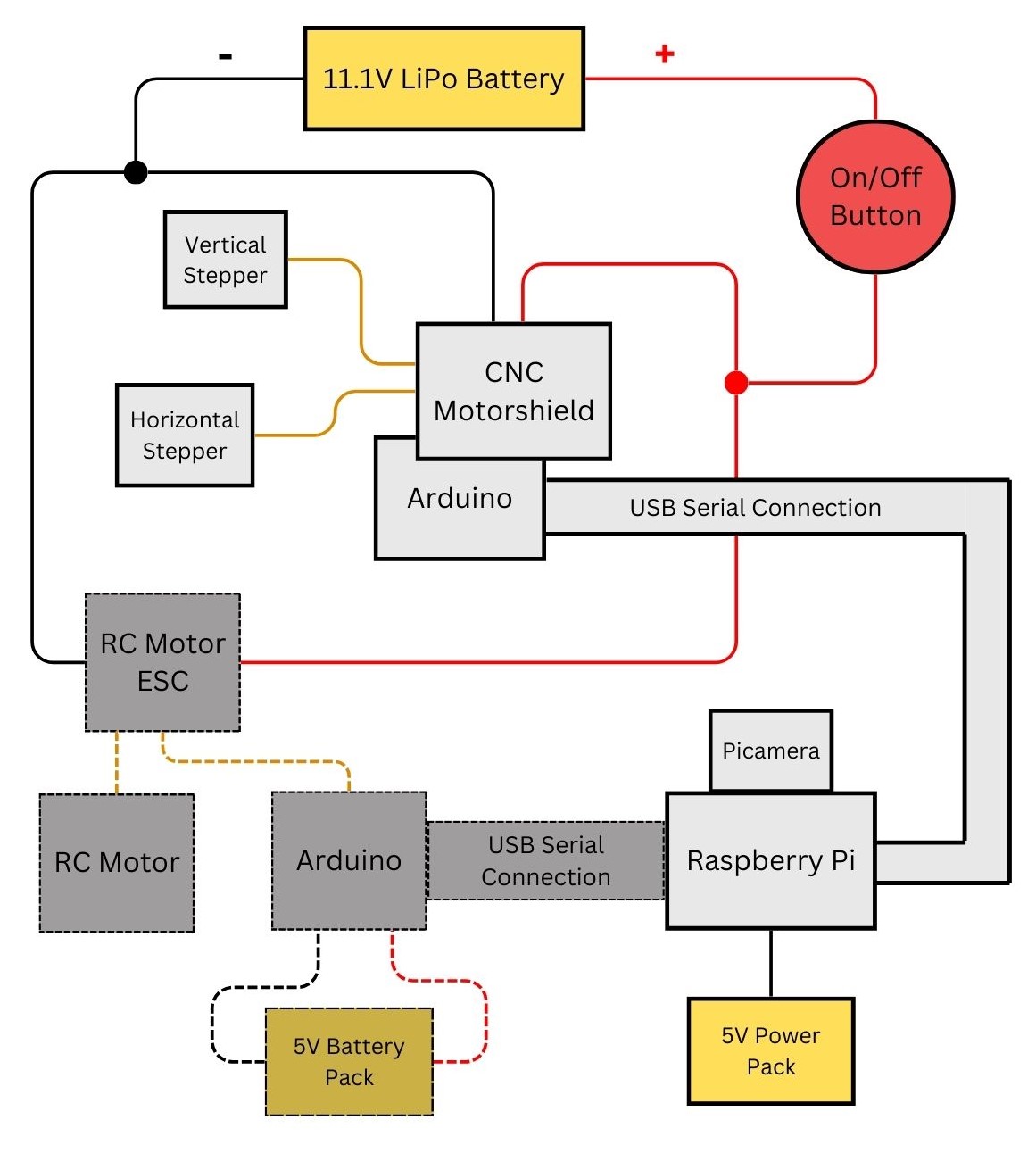
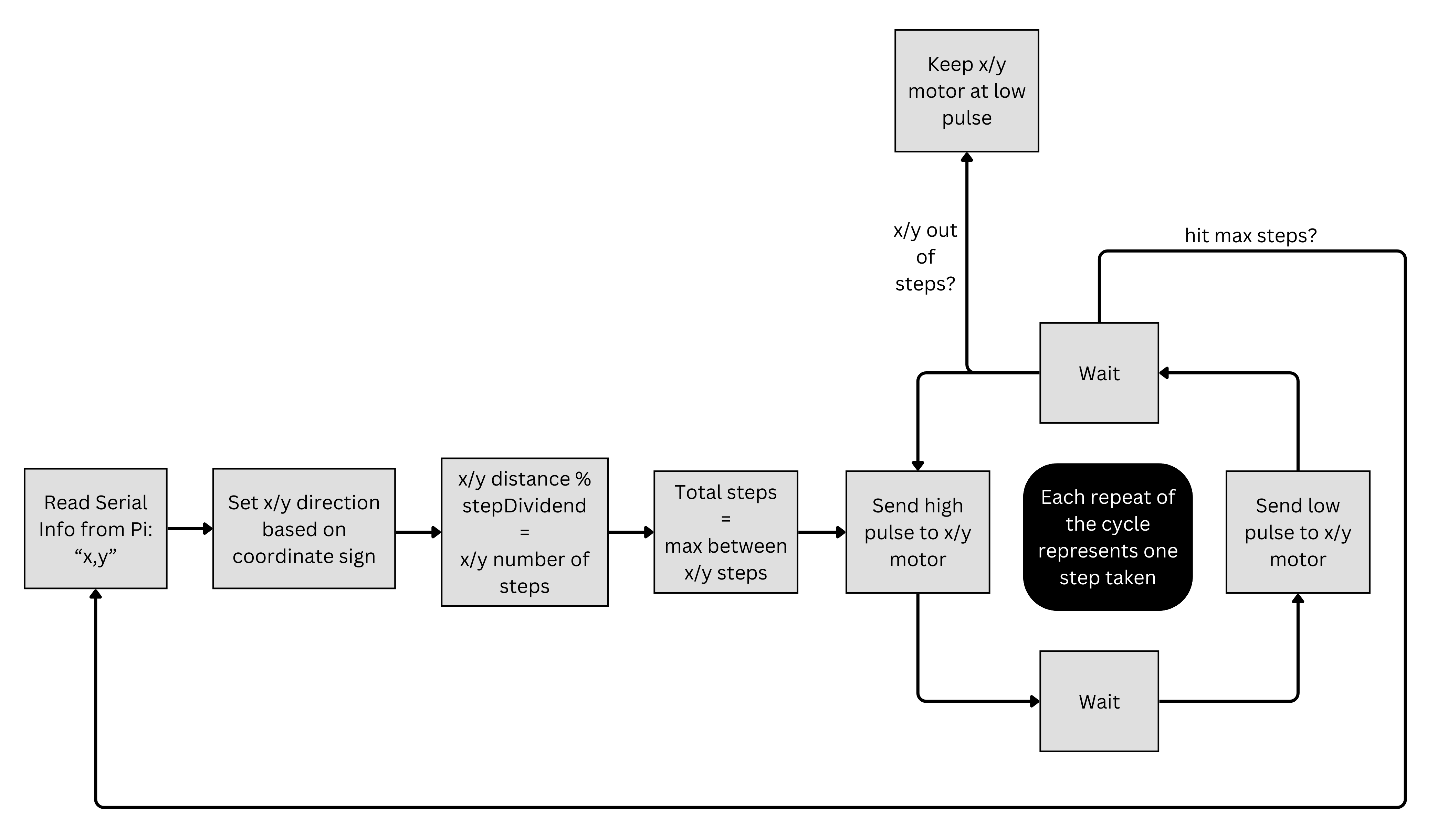
Using our Arduino UNO R3, we sent commands to the x and y stepper motors to move the camera according to commands from the Raspberry
Pi tracking program. We start by reading the x and y coordinate sent through Serial communication from the Pi-- based on the sign and
value of the coordinates, we determine the direction and number of steps each motor must take. The number of steps is also reduced
by a signDividend for each motor-- this value comes from tuning and makes sure the steppers move the appropriate amount and
aren't stuck in a loop rotating and unable to read new Pi commands.
The actual driving loop uses the maximum steps between x and y steps as a counter-- this enables us to move x and y motors in the same
loop so the camera can pan and tilt at the same time. The process of stepping once involves sending a high pulse for a short amount of time,
followed by a low pulse. Repeating this some number of times produces the same number of steps.
After the driving loop is done, the steppers are set low and go back to waiting for new Pi commands.