The goal for this sprint was to finish fabrication of the tripod as well as integrating everything. The tripod was finished, software was refined to have faster response time and less delay, and electrical began experimenting with the new driving RC motor.
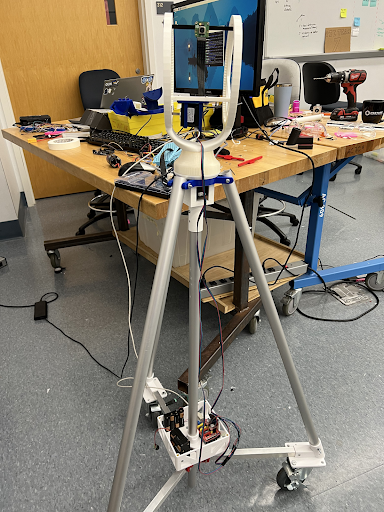
During Sprint 3, our focus centered on electrical integration for the camera system. We achieved the foundational structure for the tripod, pan-tilt mechanism, and added wheels. However, minor fastening issues arose due to a lack of communication within the mechanical team, now being addressed through improved collaboration.
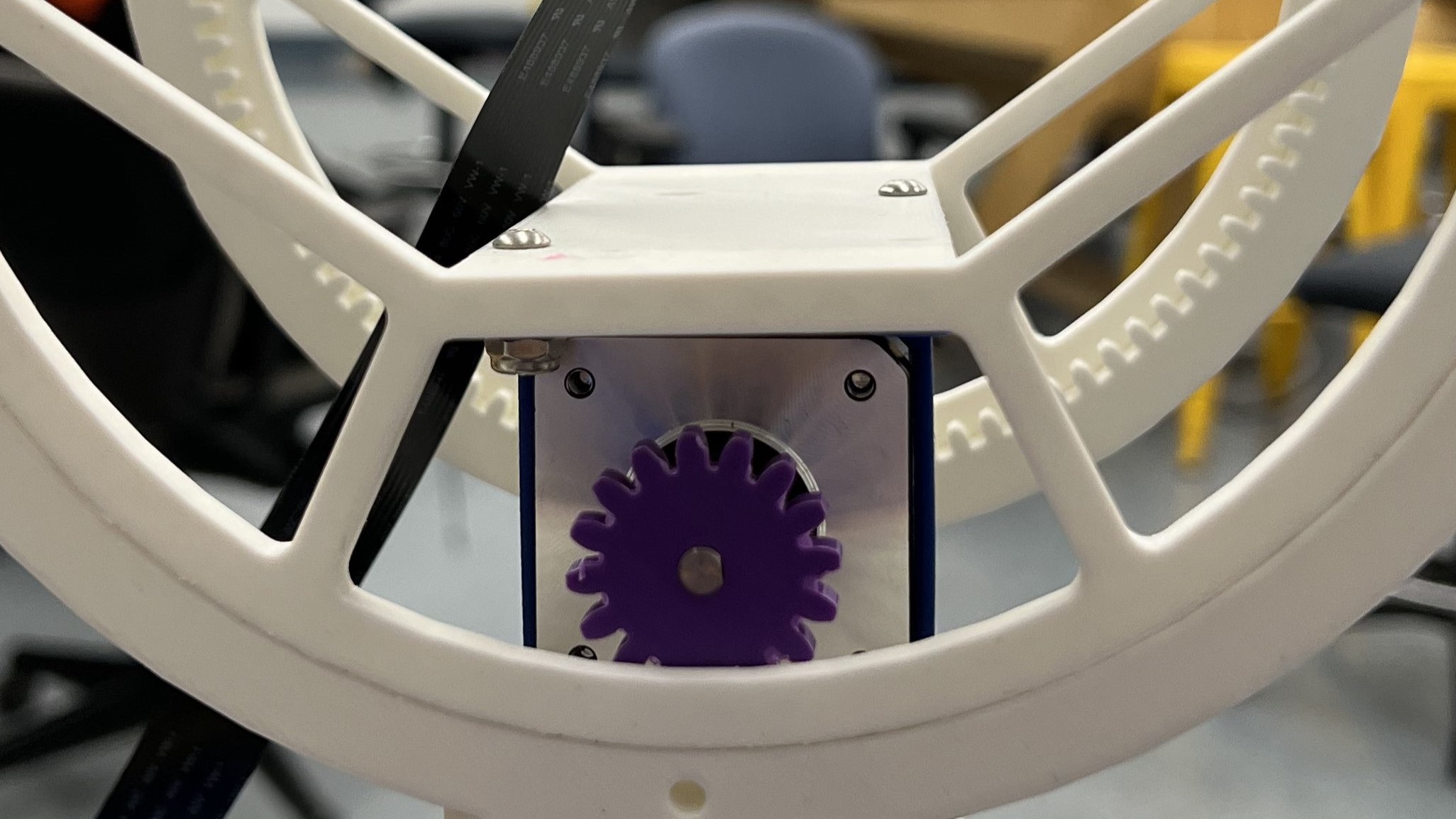
Upon system activation, limited panning and tilting were observed, swiftly resolved by applying plastic lubricant. To prevent reoccurrence, regular lubrication checks are now part of our maintenance routine.
The Raspberry Pi camera placement raised concern, prompting a quick design solution for secure integration with the professional camera.
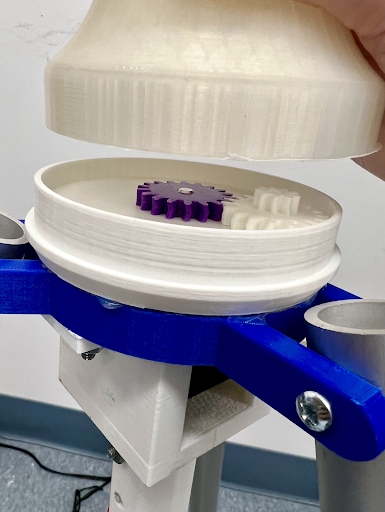
Testing unveiled unexpected instability in the pan-tilt mechanism critical for supporting a professional camera. In response, we modified the component securing tripod legs and battery pack enclosure to enhance stability, ensuring a robust system in our final design iteration.
These adjustments showcase our commitment to addressing challenges proactively. Maintaining open communication within the team remains a priority to prevent similar issues, and we look forward to refining our camera system further.
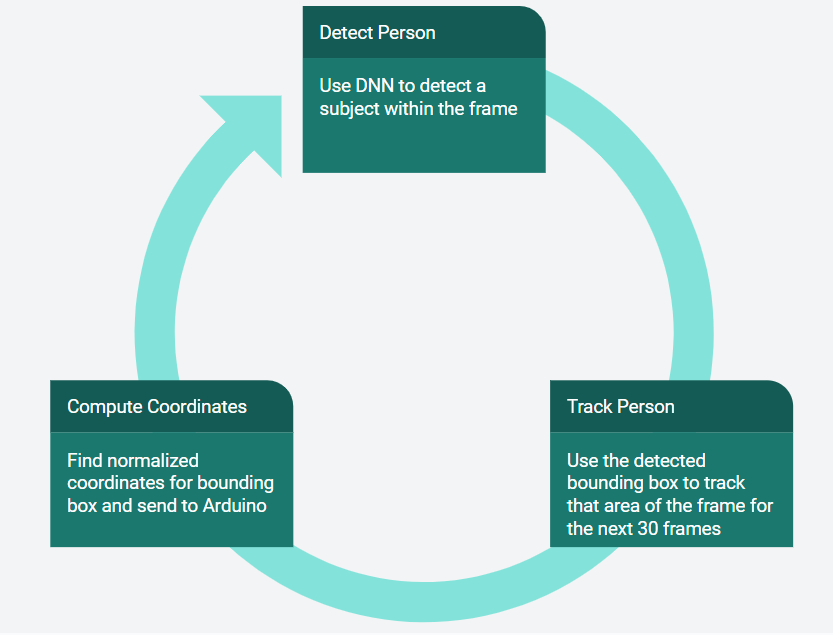
For this sprint, the goal was to improve performance, and have the camera system behave more intelligently when it lost track of its subject. For performance, an improvement in performance could be achieved via integration of a tracking system alongside the existing detection system. Since a tracking algorithm can work with just a provided bounding box and the previous frame, it places less of a computational burden on the Raspberry Pi. With the new system, object detection will be initially used to located the subject, and that bounding box will then be fed to an object tracking using the MOSSE Filter algorithm to track the provided cluster of pixels within the bounding box. By only occasion re-running detection, we gained a huge performance boost, going from only about 5 frames per second to 15.
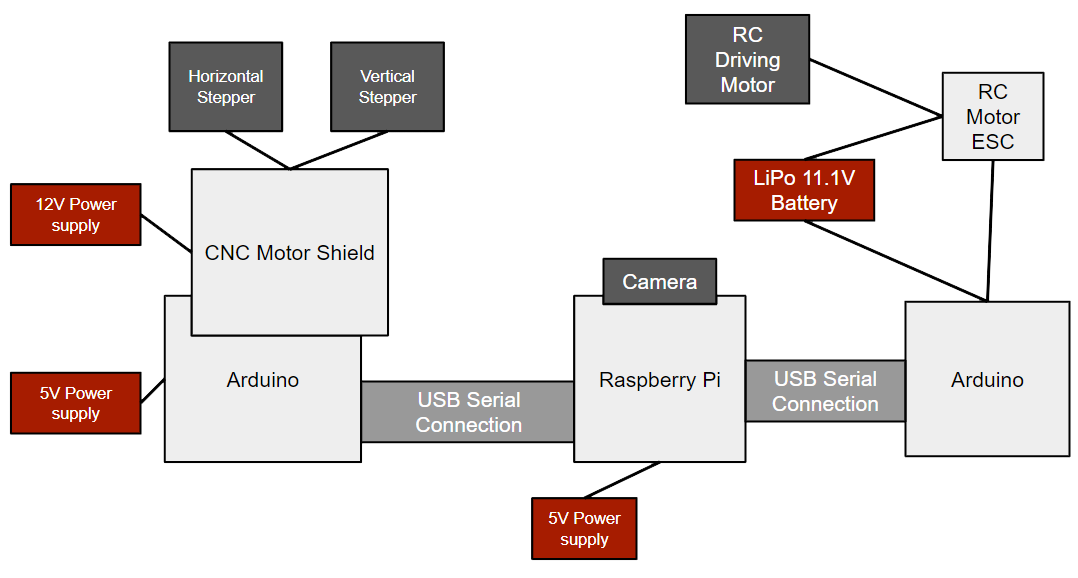
Our main goal this sprint was to get started on one of our stretch goals: making the RC motor drive the tripod. Through a lot of debugging, we figured out the calibration sequence for the motor to get it started (shown in detail in the video). In this sprint, we simply tested the motor's max speeds to see how much speed might suit our project the best.