Raspberry Pi
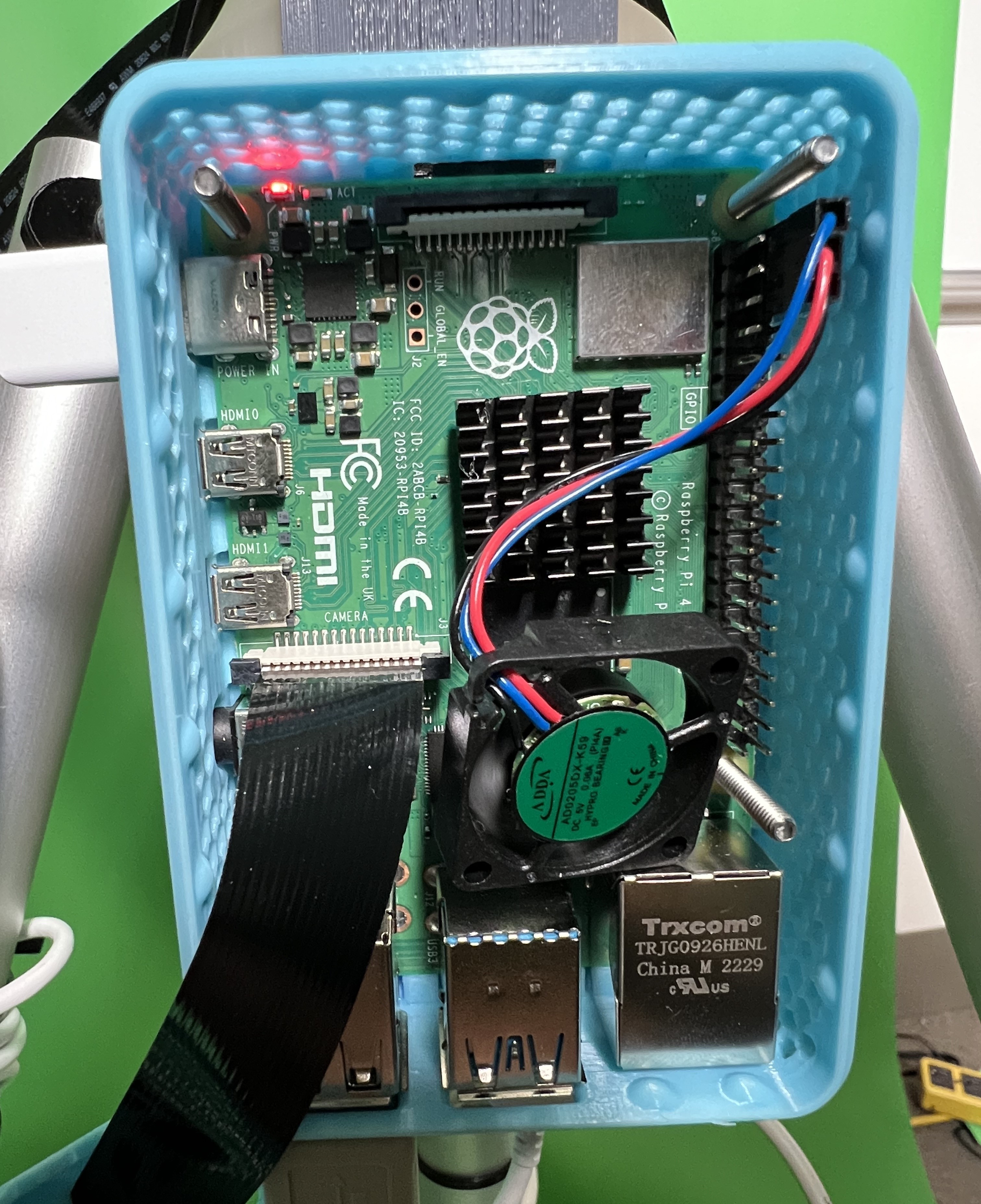

We first access the Raspberry Pi's camera through the python picamera2 module. In order to read the camera, we use the module to save the current frame as a NumPy array every timestep. The image's colorspace is then converted from RGB to BGR in order to align with OpenCV standards. OpenCV then reads and visualizes the NumPy array, which allows use to perform object detection and tracking on it.