Cyberflex
Cyberflex
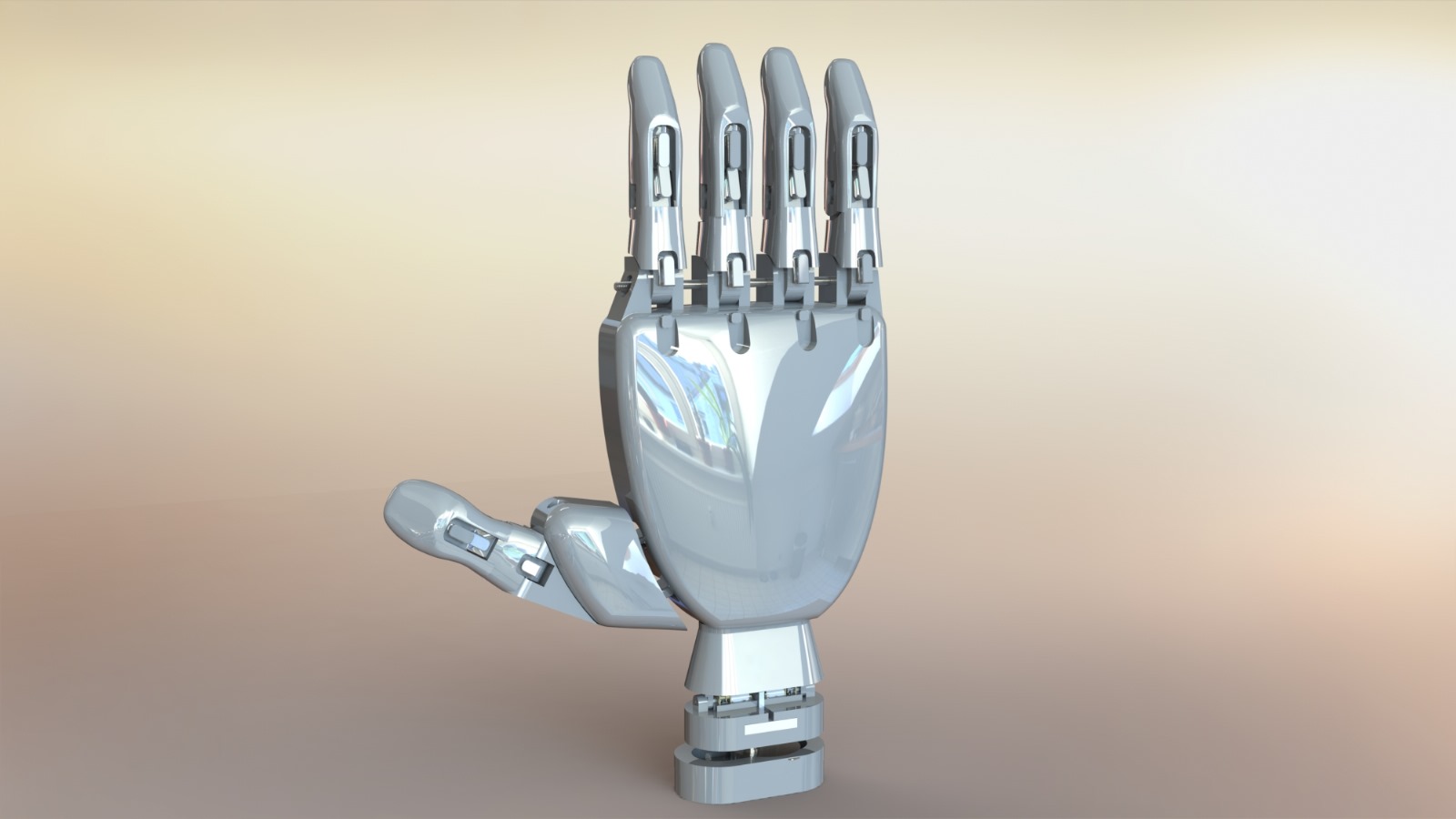
For the mechanical aspects of the hand, everything was done with CAD through Solidworks and printed with PLA filament.
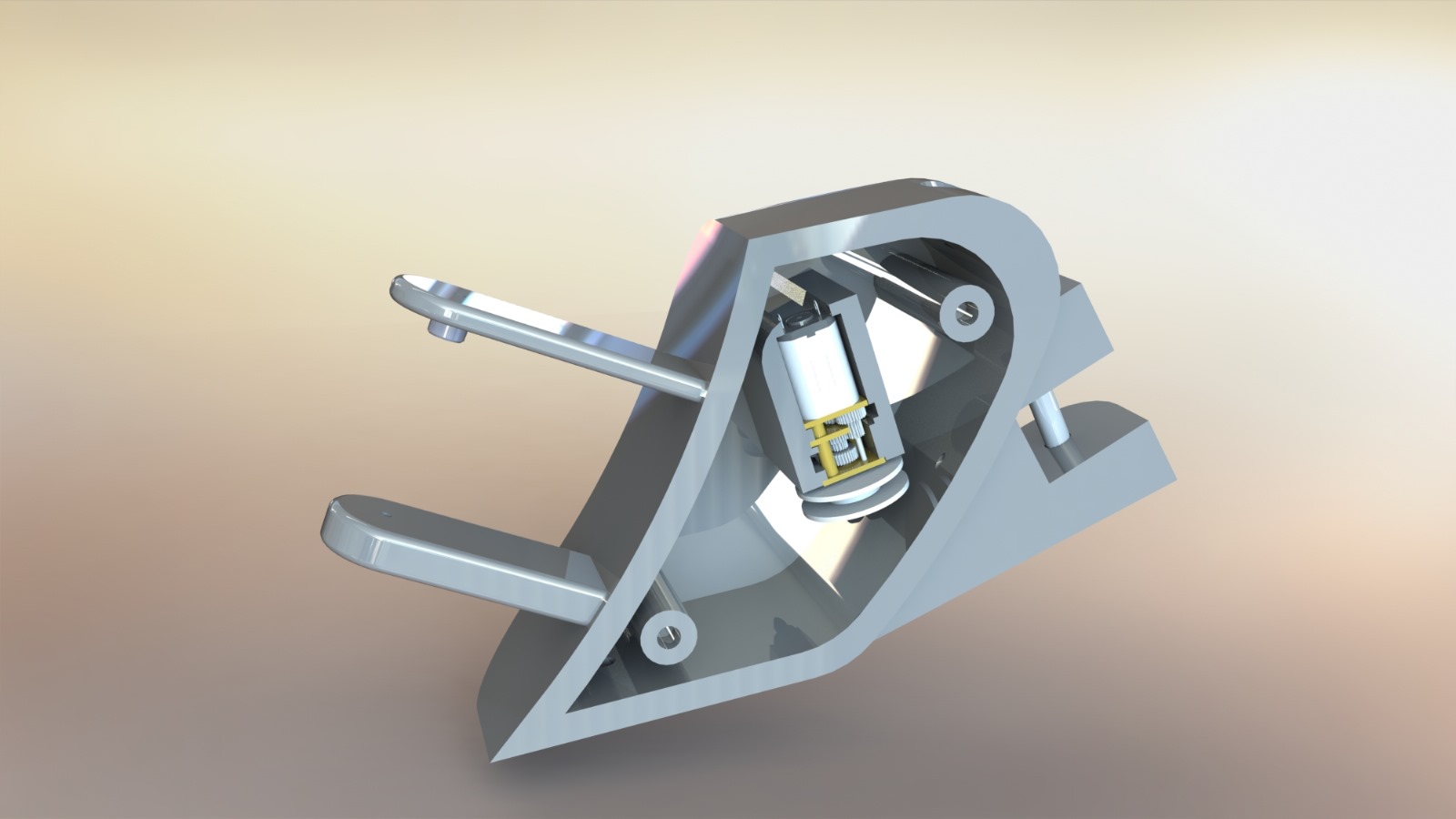
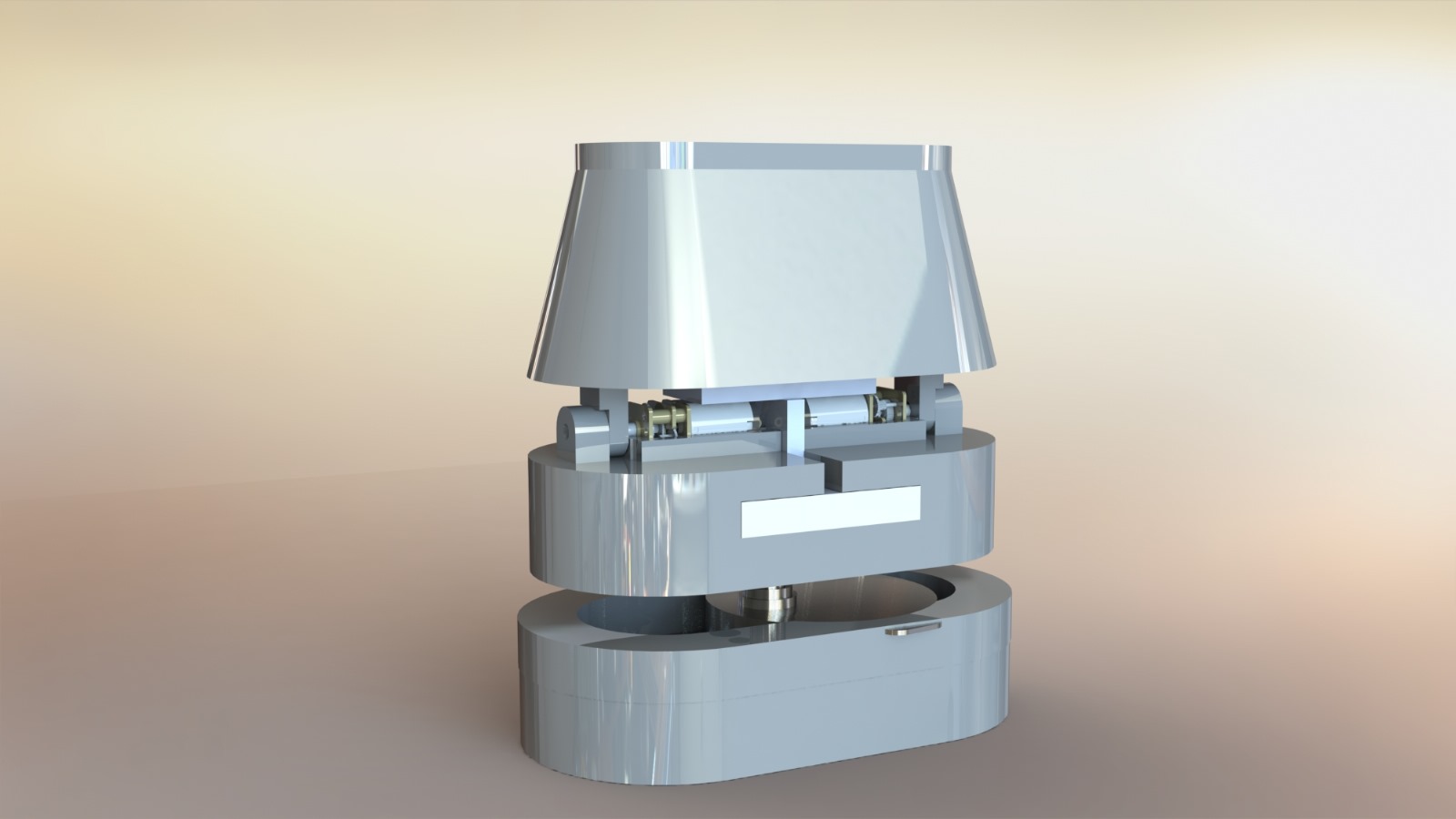
Inside the main palm, there are casings for five motors to fit inside snugly that control the fingers and thumb, one of which holds a motor that rotates the thumb palm around its shaft axis. The thumb palm contains yet another motor to control the thumb (finger portion) itself. Several portions of the covers of the two palms are extruded outwards to press gently onto all the motors and their casings to ensure that none of the motors have room to wiggle out if the friction between the motors and their casings proves to not be enough to hold them in place. Again, these covers are screwed on with the help of heat set inserts mounted on towers flush with the rim of the palm. The wrists are mounted onto the base of the main palm with bolts and consist of 3 sections–the first of which acts as a simple attachment. The middle section of the wrist contains casings holding two motors controlling the vertical motion of the wrist. The motor shafts connect to the first wrist section to rotate it. The final wrist section contains the largest and strongest motor controlling the horizontal movement of the wrist. This motor rotates the above wrist section and the entirety of the hand along with it.
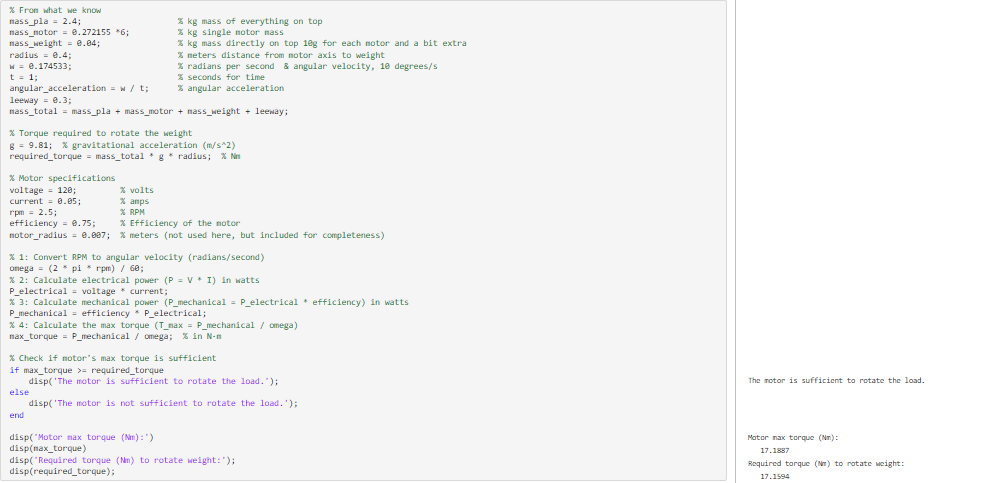
The code above is to check the wrist mechanisms how strong the motors need to be to turn left and right.
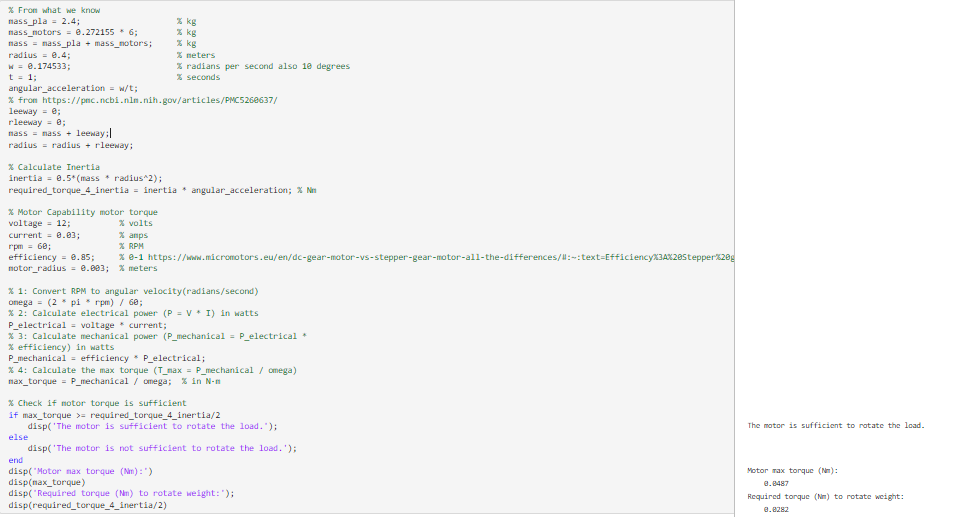
The code above is to check the wrist mechanisms how strong the motors need to be to turn up and down.
This site was created with the Nicepage