We made a timeline, divulged responsibilities, and created goals for ourselves. We started brainstorming ideas for fabrication and drawing a flow diagram as well.
We made a timeline, divulged responsibilities, and created goals for ourselves. We started brainstorming ideas for fabrication and drawing a flow diagram as well.
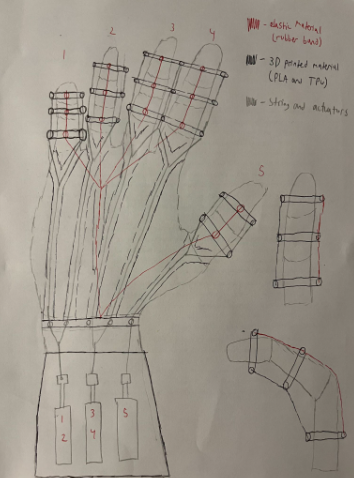
We decided on the placement of the exoskeleton and cable drive. We purchased linear actuatorsto start working with. Lastly, we drew a sketch of the design, as seen above.
We worked on getting initial data via testing sensors. We also researched the optimal motor driver board that will work with the linear actuators, use PWM at 12 volts, and be compatible with the pico.
Research on which type of machine learning model we want to use.
Research on how ML and pico will work together.