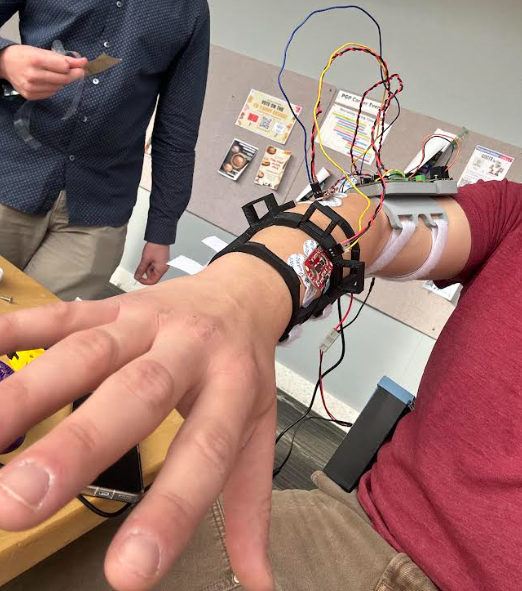
We put together all of the components and began debugging. Our final integrated prototype was completed!
We put together all of the components and began debugging. Our final integrated prototype was completed!
Integration of all of the mechanical parts, including the forearm mount, linear actuators, and housing.
Troubleshooted sensors, replaced them with better ones, and finalized the battery management system.
Fine tuning MLL and working on real-time detection.
Re-wrote code to C++.